在机器人编程与运动规划开发中,VSCode 已成为许多工程师的首选编辑器。通过合理定制工作区,不仅能提升编码效率,还能极大简化调试流程。重点在于配置语言支持、集成仿真工具、可视化轨迹以及快速部署到硬件或模拟环境。
配置专用开发环境
为机器人项目创建独立的 VSCode 工作区,能有效管理多模块代码。使用 .code-workspace 文件定义项目根目录、文件夹结构和共享设置。
常用配置包括:
添加机器人框架的源码路径(如 ROS、MoveIt、ROS2 控制包) 设置 Python 或 C++ 的 IntelliSense 路径,确保自动补全正常工作 集成终端预设命令,例如自动 source ROS 环境 安装推荐插件列表(通过 extensions.json),团队成员打开项目时可收到安装提示
集成运动规划调试工具
运动规划的核心是验证轨迹是否符合约束条件。直接在 VSCode 中调用仿真并查看结果,可减少上下文切换。
 Giiso写作机器人
Giiso写作机器人
Giiso写作机器人,让写作更简单
 56 查看详情
56 查看详情 
实现方式:
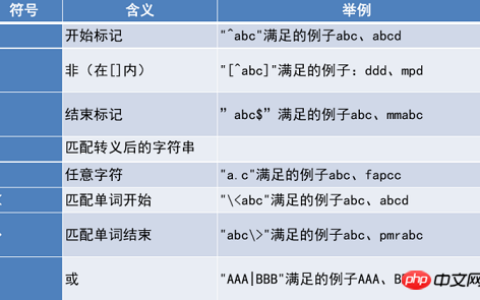
使用 Tasks 配置运行 MoveGroup 节点或自定义规划器脚本 结合 launch.json 设置调试入口,附加到 Python 或 C++ 进程进行断点调试 输出日志重定向至集成终端,配合 grep 或正则高亮关键信息(如碰撞检测失败、IK 求解超时) 调用 Rviz 作为外部可视化工具,通过 shell 命令自动启动对应配置
增强轨迹可视化与日志分析
单纯看代码难以判断轨迹质量。可通过轻量级方式在编辑器内辅助分析。
建议做法:
导出轨迹点为 JSON 或 CSV,在 VSCode 中使用 Plotly 或其他图表插件绘图 编写小型 Python 脚本解析 rosout 或 bag 数据,在侧边栏显示关节速度/加速度曲线 利用 TODO Highlight 插件标记未完成的避障逻辑或待优化路径段 关联 Jupyter Notebook,用于快速测试算法片段并可视化结果基本上就这些。一个定制到位的 VSCode 工作区能让机器人编程更聚焦,把重复操作自动化,把调试过程变得更直观。不复杂但容易忽略的是环境一致性——确保所有开发者使用相同的插件版本和路径设置,避免“在我机器上能跑”的问题。
以上就是定制VSCode机器人编程工作区与运动规划调试的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/291280.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫