在2025年刚刚结束的国际智能机器人与系统大会(iros)上,中国人工智能企业一目科技(yimu technology)凭借其在触觉感知与具身智能方向的重大技术突破,成为全场瞩目的焦点。公司不仅首次公开展示了自主研发的“一目”仿生视觉触觉传感器,更通过一场题为《触觉增强的世界模型》的主题报告,全面揭示了触觉信息如何重塑机器人的物理交互能力。
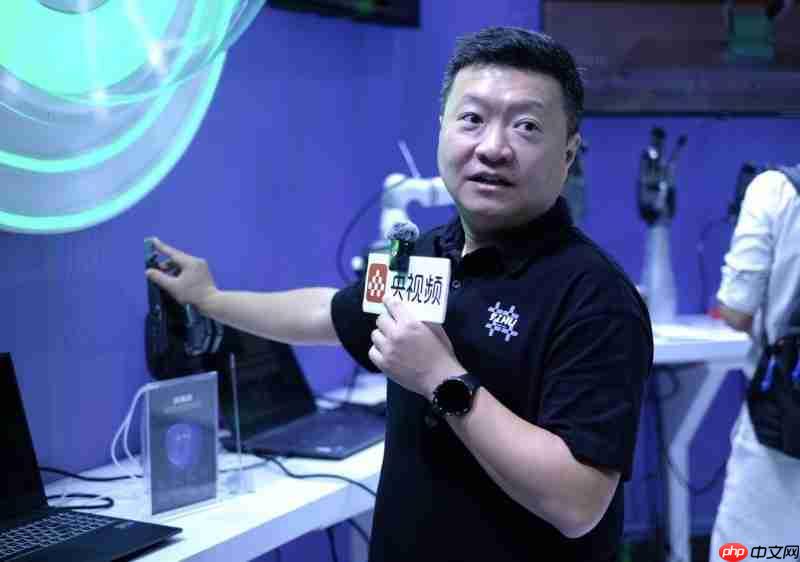
图1:一目科技CEO&李智强介绍产品
全球最轻薄可商用视触觉传感器发布,仿生设计攻克行业痛点
在一目科技的展台前,其最新研发的指尖型视觉触觉传感器引发广泛关注。公司创始人兼CEO李智强博士表示:“我们展出的并非实验原型,而是即将投入商用的全球最薄视触觉传感器。它在极致轻量化的同时,仍保持卓越的感知精度。”
该传感器采用创新的光学结构与先进材料工艺,在保留仿生人手指尖外形的基础上,大幅压缩整体厚度,显著提升了对各类灵巧手及机器人平台的兼容性。李智强进一步介绍:“即便如此纤薄,我们的传感器仍实现了0.005N的三维力分辨率和高达120fps的数据输出速率,为机器人执行精细操作提供了前所未有的高精度触觉反馈。”
这款仿生视触觉设备集成了多项核心技术:独特的光路设计有效解决了传统方案中存在的光场漂移与空间盲区问题;优化后的超软弹性体材料在确保灵敏度的同时增强了耐用性;结合端到端深度学习解算算法,避免了传统分步处理带来的误差累积,能够同步解析三维形貌、表面纹理与多维力场等丰富触觉信号。

图2:李智强博士做主题演讲
从“看见”到“触摸”:构建新一代机器人世界认知框架
在主题演讲中,李智强博士指出,尽管当前基于视觉-语言-行动(VLA)架构的模型极大提升了机器人的环境理解能力,但人类对现实世界的认知远不止于视觉层面。
“触觉承载着视觉和语言无法表达的关键信息——比如材质的粗糙或顺滑、物体的坚硬或脆弱、接触时的微小滑动等。这些细微的交互细节,正是物理智能得以落地的核心。”他提出的“视觉-触觉-语言-行动”(VTLA)融合范式,引发了现场学术界的强烈共鸣。
这一理念直击当前具身智能发展的关键瓶颈:相较于已借助海量数据快速进化的导航与运动控制能力,涉及实际接触的操作任务因高质量触觉数据稀缺而进展缓慢。
 怪兽AI知识库
怪兽AI知识库
企业知识库大模型 + 智能的AI问答机器人
 51 查看详情
51 查看详情 
图3:搭载一目科技视触觉传感器的机械臂夹薯片
构建真实锚定仿真体系,推动“操控即服务”落地
一目科技同时展示了其独创的触觉数据生成系统。通过建立以真实触觉采集为基准的仿真平台,并融合生成式AI技术生成大量符合物理规律的多样化数据样本,突破了传统人工采集效率低下的局限,使机器人操作技能的学习速度实现数量级跃升。
展会现场,装配该传感器的机械臂成功完成了诸如抓取薯片等易碎物品的高难度任务,充分验证了触觉反馈在精密操控中的决定性作用,也为公司提出的“操控即服务”(Manipulation as a Service)愿景提供了坚实的技术支撑。

图4:参展人员互动体验
首登国际舞台,中国力量引领触觉感知前沿
此次IROS之行,标志着一目科技首次在全球顶级机器人会议上亮相,也成为与中国乃至世界顶尖科研团队深入交流的重要契机。会议期间,来自多个国家的机器人实验室研究人员纷纷驻足展台,亲身体验传感器性能,并就技术细节展开深入探讨。
“触觉是机器理解物理世界的基本语言,而指尖,正是这种语言的起点。”正如一目科技在演讲结尾所强调的那样,随着触觉感知技术不断成熟并加速走向商业化,真正的具身智能正逐步成为现实。这场IROS的惊艳首秀,不仅彰显了一目科技的技术实力,也昭示着中国企业在具身智能这一前沿赛道上,正稳步迈向全球引领地位。
以上就是触觉增强世界模型引关注,一目科技IROS首秀定义机器人感知新维度的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/324936.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫