
机器之心原创
编辑:吴昕
4 月 19 日早上七点半,北京亦庄,全球首场人形机器人半程马拉松在南海子公园鸣枪起跑。
来自北京、上海、江苏、广东等地的 20 支机器人队伍,与 1.2 万名人类选手一同出发,挑战 21.0975 公里赛程——途经南海子公园、泡桐大道、文博大桥,终点设在国家信创园。
别看沿途风景宜人,对人形机器人来说却是一场「 Hard 模式」挑战:超长距离、最大 9 度的坡道、14 次转弯、1.5 公里冲刺直道,连路上的井盖都可能成为绊脚石;更别提几十台机器人同场,还要应对通信拥堵。
最终,全尺寸人形机器人「天工Ultra」以 2 小时 40 分 42 秒率先撞线,创下全球人形机器人半马 PB ( Personalbest )。

「天工Ultra」冲刺瞬间。目前实测平均时速可达10km/h,最高奔跑速度已提升至全球领先的12km/h。当天比赛配速约为7-8km/h
去年还在比谁走得稳,今年就开卷马拉松,越来越多的人形机器人加入竞技行列——蛇年春晚,宇树机器人手帕舞利落吸睛;众擎机器人完成全球首个前空翻;Atlas 也秀出侧空翻,个个身手不凡。
人形机器人进化的速度远超想象,正在打开更多商业化场景的想象力大门。
夺冠背后:全尺寸机器人的技术登顶
要想跑得好,先得扛过这场「极限测试」里的重重「坑」。
超长距离本身就是对电池续航的极限考验;最大 9 度坡道,考核机器人对重心调控与动力输出的能力;14 次转弯、最小转弯角 90 度,逼它们在高速运动中完成动态平衡与灵活转向。
就连一个井盖,都可能成为致命陷阱。以往的机器人难以应对这类微小地形扰动,如今借助强化学习与地形仿真训练,才逐步具备「反应力」。
而对「天工Ultra」这类全尺寸人形机器人(身高 180、体重 55 公斤)来说,意味着重心更高、惯性更大,光站稳就已是挑战,完赛的技术难度几乎翻倍。
其次,它的驱动关节需要输出更大扭矩来支撑高负载,运动控制算法也必须实时应对更大惯性带来的平衡难题。能耗同步飙升,长跑过程中的续航和散热都被拉到极限。

「天工Ultra」最后以绝对优势、毫无悬念地夺冠,靠的是三重技术跨越,涵盖机器人系统三大核心:本体、运动控制(小脑)、智能决策(大脑)。
超长距离、超长时间运转,本体硬件先要扛得住。为了让这台「重量级选手」可以跑得持久,除了整机「减肥」,关节设计的黑科技感直接拉满。
核心关节采用「大功率一体化关节」,类似给汽车装上了 V8 发动机,爆发力直接拉满。同时,腿部设计追求「低惯量」,跑步更流畅。
人们常说,跑马最担心关节磨损,机器人最担心关节散热。「天工Ultra」在散热系统上做了重要革新——除了从电机源头就减少发热,还应用了整机热仿真技术等多种方式,确保关节核心区域的温度始终稳定在 70℃ 以下,长跑过程中既能保持温度不过热,也能稳定输出动力。
考虑到金属脚直接着地,震动非常强烈,「天工Ultra」还在腿部结构上引入了类似人类跟腱的设计,起到缓冲、吸震的作用。

天工Ultra甚至穿上了黑色跑鞋
再说「小脑」。硬件扛得住还不够,爬坡迈坎再转弯,动作要稳,运动神经必须够发达。
「天工Ultra」内置了北京人形机器人自研的「基于状态记忆的预测型强化模仿学习」控制策略。也就是说,它不仅能实时感知现在的身体状态,还能「记住过去几步发生了什么」,从而更准确地预测接下来如何调整姿态。
而强化学习仿真让它在虚拟世界里经历成千上万次摔倒与站起,练就了几乎本能的平衡控制能力。即使在雪地、碎石路、斜坡这种「地狱难度地图」里,也能保持稳定。
通过在神经网络里加入落脚点规划与速度控制的双重指令,它不仅跑得稳,还能踩得准,实现了对突起、凹陷、减速带、细小石子等真实道路状态的高动态适应。

此次比赛中,「天工Ultra 」 采用无线领航技术完成跟随导航和长程路径规划,也是唯一不使用人工遥控的参赛机器人:
奔跑时,前面有一位领航员,身上背着小巧的信号发射器,机器人可以自主追踪目标,判断该往哪个方向跑、以什么速度跑,天工会实施感知周边环境,进行分析,一路动态调整路线规划及运动姿态,完成比赛。

奔跑时,前面有一位领航员
这就要靠「大脑」了——边跑边规划路径;还能识别障碍物、判断能不能过;遇到动态障碍,还能预测对方轨迹,生成安全绕行路线,展现出更强的环境适应能力和稳定性。在未来工业与特种场景中,这种级别的「大脑」,才是让机器人走出实验室、真正干活的关键。
「人机半马」背后
一场规模化商用落地的压力测试
具身智能融资热潮可谓开年即高燃,政策端同样在加码。3 月全国两会,具身智能首次作为「未来产业」关键词写入政府工作报告,与生物制造、量子科技、6G 并列提名。有投行人士判断,机器人将是「十倍于新能源车」的下一个超级风口。
来源《财新周刊》封面报道:机器人来了
在这样的大背景下,这场「人机半马」的意义早已超越竞技层面,更是机器人能否走向「规模化落地」的压力测试:
关节强度、运动控制算法、能耗管理、硬件散热、电池续航、大脑对复杂地形的理解与适配、小脑对机器人身体的运动及平衡控制……这些核心技术的短板和瓶颈,唯有放到真实环境中、长时间运行下,才能暴露、验证、优化。
 Giiso写作机器人
Giiso写作机器人
Giiso写作机器人,让写作更简单
 56 查看详情
56 查看详情 
能不能连续自主、稳定地执行任务,正是人形机器人迈向实际场景的第一道门槛。而今天,在亦庄的赛道上,机器人的表现已经刷新了答案。
以「天工Ultra」为例,其核心部件经受住了 2 小时以上的连续运行考验,采用电池快换方案,全程仅换了 3 次电池,未来有望实现作业连续性的新突破。这意味着,除了科研教育和消费娱乐,其应用空间正拓展至车厂拧螺丝、搬运、超市搬货、智慧园区巡逻、物流分拣等更多工业和泛工业级场景。
更重要的是,马拉松环境对「动态平衡」和「地形鲁棒性」的考验,与安防机器人、户外巡检机器人在现实中的核心能力要求高度一致。在复杂电网、管廊、园区等场景中,跨沟渠、越井盖、稳过减速带,都是日常;机器人不仅要稳,还要抗外力干扰,能够自主决策、灵活应对。
量产拐点的攻坚
其实,早在两年前,工信部就已发布《人形机器人创新发展指导意见》,提出「 2025 年具备批量生产能力」的目标。而从实验室走向规模化商用,除了算法和硬件攻坚,另一关键是——降低开发门槛,让更多开发者能够参与构建机器人应用生态。
就在 3 月,北京人形机器人创新中心推出全球首个实现「一脑多能、一脑多机」的通用具身智能平台「慧思开物」,率先为机器人提供「大脑操作系统」。
该平台融合 AI 大模型驱动的任务规划「具身大脑」与数据驱动的技能执行「具身小脑」,打通了从任务理解到动作控制的全链路,能够适配从工业制造到家庭服务等多种场景,执行各类复杂任务,如工业分拣、整理桌面、物流打包,也兼容人形、轮式、机械臂等多种形态机器人。
目前,该平台架构的应用提升了开发效率,为机器人从「实验室成果」变为「工程化应用」提供了统一中枢。
「慧思开物」在物流场景下的操作demo:接收「打包快递」指令后,机器人将任务拆解为拿扫码枪、扫码、放置物品、贴单、封箱等一系列动作,由「具身大脑」规划、「具身小脑」执行。
技术不断突破,开发效率加速,要推动人形机器人跑进现实世界还需要硬件标品化。
以「天工Ultra」为例,之所以能稳定跑完半马,离不开本体结构的稳固与续航能力的大幅提升——支持连续运行数小时不中断,并在不到 5 秒内完成热插拔换电。这背后,是电池管理系统与快充技术的双重革新。
比赛落幕后,全新一代「天工 2.0 」在赛场展区亮相。相较前代机型,「天工 2.0 」在本体结构、作业性能与操作系统等多个维度实现全面升级,吸引了大量观众驻足围观。
续航能力上,全新一代「 天工2.0 」还将具备工业级永续作业能力,配合多工况能耗控制技术,续航表现大幅跃升。另外,「 天工2.0 」将搭载「慧思开物」平台,拥有自然交互、任务精准规划、双臂协同灵巧操作、多技能执行等能力,具备处理多场景复杂任务的泛化能力,可以在工业制造、特种作业、商业服务、家庭生活等多元场景展开应用。

在赛后展区,全新一代天工2.0亮相
与此同时,核心部件国产化也在快速推进。就连过去被视为卡脖子的高精度零部件——如谐波减速器、RV 减速器、行星滚柱丝杠等,也被国内供应商逐步突破,「能量包」供应也已形成多家本土解决方案。「天工Ultra」的关节模组、驱动电机等核心部件也实现国产替代,成本更可控。
针对关节发热的难题,「天工Ultra」用了石墨烯复合散热膜,就像给「关节」贴了高效散热贴纸,连续运转时温度能降低 18℃,大大提升了长时间工作的可靠性。
政策与供应链共振
人形机器人加速走向量产,背后离不开庞大供应链体系和政策的合力。
不少投行人士直言,中美在 AI 大模型和具身智能起跑线大致一致,但若论谁能让机器人真正「量产」,中国具备最强成本工程能力与产业集成效率。
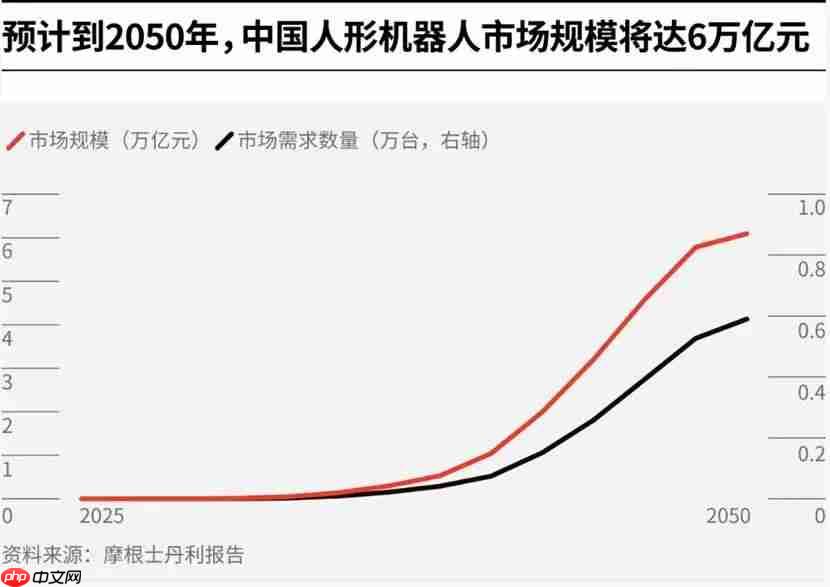
摩根士丹利发布的《人形机器人 100 》报告显示,在全球最具代表性的人形机器人公司中,近七成来自中美,而中国独占 36 家企业,并掌握了约 63% 的供应链份额。
有意思的是,本次半马的 20 支参赛队伍主要来自京津冀(如北京)、「长三角」(如杭州)和「珠三角」(如深圳)这三个机器人公司的主要聚集地,也是传感器、精密加工、工业设计等供应链资源聚集:
北京更擅长「造脑」,也聚集了大量 AI 科研人才。据说,具身智能领域的技术转化周期快,实验室成果落地产业仅需 3-6 个月,实属罕见;
「长三角」在电机、传感器等核心部件方面独具优势;
「珠三角」依托手机、汽车主机厂,在精密加工、系统集成、零部件通用性等方面优势明显。据说,约 60% 的汽车零件可直接用于人形机器人身上,大大降低了开发成本。
2024 年以来,杭州、北京、上海、深圳等多地还陆续出台了 AI 与机器人专项扶持政策,国家级创新中心先后在北京、江苏等地落地,多个产业园区设立专项基金与孵化机制。多家券商机构预测,2025 年或将是人形机器人量产元年。
当上述因素多线共振,人形机器人正以「半马」的速度,撞开一个千亿级产业的大门。

观众在2024世界智能制造博览会上参观人形机器人
比赛当天的展区里,全新一代「 天工2.0 」周围人潮涌动,让人联想起比赛中为「钢铁选手」加油呐喊的场景——虽然人们明知这些欢呼声机器人无法理解、也不会回应,但加油的声音依旧真诚而热烈。
物理栅栏分隔着碳基生命与硅基造物,而那道存在于人类认知深处的无形边界,似乎正悄然松动。越来越多的人开始相信,也开始期待:有朝一日,人形机器人不仅能驰骋赛场,更能真正走进我们的日常生活。
南海子公园的鸣枪,或许正是通向未来旅程的起跑枪声。
© THE END
转载请联系本公众号获得授权
以上就是「天工Ultra」半马夺冠,人形机器人通关产业落地第一关的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/412958.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 






















