
本文分享了CV GAN相关的实用轮子和技巧,助新人节省时间。包括VGG的感知损失实现代码及使用示例,SNGAN的谱归一化应用,MultiscaleDiscriminator等多种判别器架构,还探讨了模型初始化问题,介绍Xavier和He初始化方法及相关代码,为GAN实践提供便利。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

那些好用的CV GAN轮子和 trick
我很懂刚开始接触一个领域,那个时候想做自己尝试但是苦于没有一些通用的轮子从而花费大量的时间浪费在检索和造轮子上,这里我希望各位新人能够节约一些自己宝贵的时间,这就是这个项目的目的
也算一次经验的总结分享了,我会把我的一些思考和trick在本章分享,希望大家有所收获,若有错误请指出啊。
1. 使用VGG的感知损失(perceptual loss)
这个损失在风格迁移中使用很多,大家如果刚开始做风格迁移任务一般也很难拥有属于自己的感知损失,这里我就替大家写好了,拿走不谢
这里我举一个例子谷歌的实时风格迁移算法,确定不想进来看看?我只能说精彩简陋版复现在这个项目中我用了。
import numpy as npimport paddleimport paddle.optimizerimport paddle.nn as nnimport paddle.nn.functional as Fclass VGG19(nn.Layer): cfg = [ 64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512,'M', 512, 512, 512, 512, 'M'] def __init__(self, output_index: int = 30) -> None: super().__init__() # arch = 'caffevgg19' # weights_path = get_path_from_url(model_urls[arch][0], # model_urls[arch][1]) data_dict: dict = np.load("./VGG/vgg19_no_fc.npy", encoding='latin1', allow_pickle=True).item() self.features = self.make_layers(self.cfg, data_dict) del data_dict self.features = nn.Sequential(*self.features.sublayers()[:output_index]) mean = paddle.to_tensor([103.939, 116.779, 123.68]) self.mean = mean.unsqueeze(0).unsqueeze(-1).unsqueeze(-1) def _process(self, x): rgb = (x * 0.5 + 0.5) * 255 # value to 255 bgr = paddle.stack((rgb[:, 2, :, :], rgb[:, 1, :, :], rgb[:, 0, :, :]), 1) # rgb to bgr return bgr - self.mean # vgg norm def _forward_impl(self, x): x = self._process(x) # NOTE get output with out relu activation features_list =[] # print("features.sub",self.features.sublayers()) for layer in self.features.sublayers(): x =layer(x) if isinstance(layer,nn.ReLU): features_list.append(x) # features_list.append(x) # print(len(features_list[-5:])) # x = self.features(x) return features_list def forward(self, x): all_features = self._forward_impl(x) features_list = [] features_indexs = [0,2,4,8,12] for d in features_indexs: features_list.append(all_features[d]) return features_list @staticmethod def get_conv_filter(data_dict, name): return data_dict[name][0] @staticmethod def get_bias(data_dict, name): return data_dict[name][1] @staticmethod def get_fc_weight(data_dict, name): return data_dict[name][0] def make_layers(self, cfg, data_dict, batch_norm=False) -> nn.Sequential: layers = [] in_channels = 3 block = 1 number = 1 for v in cfg: if v == 'M': layers += [nn.MaxPool2D(kernel_size=2, stride=2)] block += 1 number = 1 # print("M",len(layers)) else: conv2d = nn.Conv2D(in_channels, v, kernel_size=3, padding=1) """ set value """ weight = paddle.to_tensor( self.get_conv_filter(data_dict, f'conv{block}_{number}')) weight = weight.transpose((3, 2, 0, 1)) bias = paddle.to_tensor( self.get_bias(data_dict, f'conv{block}_{number}')) conv2d.weight.set_value(weight) conv2d.bias.set_value(bias) number += 1 if batch_norm: layers += [conv2d, nn.BatchNorm2D(v), nn.ReLU()] else: layers += [conv2d, nn.ReLU()] in_channels = v # print("number",block) return nn.Sequential(*layers)
In [1]
'''该代码块是VGG19去除最后几层全连接还有卷积得到的特征提取器 的使用案例好久以前基于pytorch改成paddle的,不要问我代码源头,我自己也忘了github哪个大神的,在这里做成好用的轮子,好用就行了别管那么多使用格式:代码在VGG_Model.py中,然后参数文件npy存在VGG文件夹中输入tensor [N,C,H,W] 通道顺序RGB 数值区间[-1,1]return 最后的特征feature,和逐层特征组成的list(每次relu后的特征图加最后的conv特征图)[:-5] 说白了就是返回一个tensor和listPS:想改的话就自己改'''from VGG_Model import VGG19import numpy as npimport paddlem = np.random.random([1, 3,256,256])real_image = paddle.to_tensor(m,dtype="float32")features_list = []'''这是我常用的算感知损失各个特征图损失的比例'''rates = [1.0 / 32, 1.0 / 16, 1.0 / 8, 1.0 / 4, 1.0]all_features = VGG19()(real_image)# print(len(all_features))# for i in all_features: # print(i.shape)print("------------------------------")for i in all_features: # print(all_features[d].shape) print(i.shape)print(len(all_features))
------------------------------[1, 64, 256, 256][1, 128, 128, 128][1, 256, 64, 64][1, 512, 32, 32][1, 512, 16, 16]5
2. 来自SNGAN的谱归一化
论文名称:Spectral Normalization for Generative Adversarial Networks
这个就是为了让GAN生成对抗损失下降更加稳定,然后谱归一化是用在判别器参数上的,这是个很好用的GAN trick.目的是让判别器满足Lipschitz约束。
这个代码第一次认识到SN(Spectral Normalization)来自于FutureSI的SPADE项目,我数学暂时不行,然后具体原理论文我没看过啊。
下方代码块写了具体应用案例
In [4]
'''该代码块代表谱归一化示例,判别器用到了这个,可以参考一下'''from Normal import build_norm_layerimport paddle.nn as nnimport paddleSpectralNorm = build_norm_layer('spectral')import numpy as npinput_nc = 3x = np.random.uniform(-1, 1, [4, 3, 256, 256]).astype('float32')x = paddle.to_tensor(x)conv = SpectralNorm(nn.Conv2D(3, 5, 3, 2, 1, weight_attr=None, bias_attr=None))conv(x).shape
[4, 5, 128, 128]
3. 判别器架构
这里提供几种判别器的架构,大家可以自己拿去尝试
3.1 MultiscaleDiscriminator
这个判别器,把中间的特征也输出了,进行一个特征对齐,方便进行Feature Match Loss,进行一个特征匹配.
我在衣服生成项目用过这个判别器
import numpy as np# import osimport paddleimport paddle.optimizerimport paddle.nn as nn# from tqdm import tqdm# from paddle.io import Dataset# from paddle.io import DataLoader# import paddle.tensor as tensorfrom Normal import build_norm_layerclass D_OPT(): ''' opt格式 ''' def __init__(self): super(D_OPT, self).__init__() self.ndf = 64 self.n_layers_D = 4 self.num_D = 2# 当使用谱归一化时,手动设置卷积层的初始值(由于参数名称的改变,weights_init无法正常工作)spn_conv_init_weight = nn.initializer.Constant(value=2e-2)spn_conv_init_bias = nn.initializer.Constant(value=.0)# spn_conv_init_weight = None# spn_conv_init_bias = Noneclass NLayersDiscriminator(nn.Layer): def __init__(self, opt): super(NLayersDiscriminator, self).__init__() kw =3 padw = int(np.ceil((kw - 1.0) / 2)) nf = opt.ndf#64 input_nc =3 layer_count = 0 layer = nn.Sequential( nn.Conv2D(input_nc, nf, kw, 2, padw), nn.LeakyReLU(0.2) ) self.add_sublayer('block_'+str(layer_count), layer) layer_count += 1 # feat_size_prev = np.floor((opt.crop_size + padw * 2 - (kw - 2)) / 2).astype('int64') SpectralNorm = build_norm_layer('spectral') InstanceNorm = build_norm_layer('instance') for n in range(1, opt.n_layers_D): nf_prev = nf nf = min(nf * 2, 512) stride = 1 if n == opt.n_layers_D - 1 else 2 layer = nn.Sequential( # nn.Conv2D(nf_prev, nf, kw, stride, padw, # weight_attr=spn_conv_init_weight, # bias_attr=spn_conv_init_bias), SpectralNorm(nn.Conv2D(nf_prev, nf, kw, stride, padw, weight_attr=spn_conv_init_weight, bias_attr=spn_conv_init_bias)), InstanceNorm(nf), nn.LeakyReLU(.2) ) self.add_sublayer('block_'+str(layer_count), layer) layer_count += 1 layer = nn.Conv2D(nf, 1, kw, 1, padw) self.add_sublayer('block_'+str(layer_count), layer) layer_count += 1 def forward(self, input): # print("NLayersDiscriminator input shape",input.shape) output = [] for layer in self._sub_layers.values(): output.append(layer(input)) input = output[-1] return outputclass MultiscaleDiscriminator(nn.Layer): def __init__(self, opt): super(MultiscaleDiscriminator, self).__init__() for i in range(opt.num_D):#num_D =2 sequence = [] for j in range(i): sequence += [nn.AvgPool2D(3, 2, 1)] sequence += [NLayersDiscriminator(opt)] sequence = nn.Sequential(*sequence) self.add_sublayer('nld_'+str(i), sequence) def forward(self, input): output = [] for layer in self._sub_layers.values(): output.append(layer(input)) return outputdef build_m_discriminator(): return MultiscaleDiscriminator(D_OPT())if __name__ =="__main__": opt = D_OPT() md = MultiscaleDiscriminator(opt) md = build_m_discriminator() np.random.seed(15) # nld = NLayersDiscriminator(opt) # input_nc = nld.compute_D_input_nc(opt) input_nc = 3 x = np.random.uniform(-1, 1, [4, 3, 256, 256]).astype('float32') x = paddle.to_tensor(x) print("input tensor x.shape",x.shape) y = md(x) for i in range(len(y)): for j in range(len(y[i])): print(i, j, y[i][j].shape) print('--------------------------------------')
下方代码块就是具体封装好的使用方法
In [ ]
# !python -u Discriminator.py'''该代码块代表多尺度判别器示例'''from Discriminator import build_m_discriminatorimport numpy as npmd = build_m_discriminator()input_nc = 3x = np.random.uniform(-1, 1, [4, 3, 256, 256]).astype('float32')x = paddle.to_tensor(x)print("input tensor x.shape",x.shape)y = md(x)for i in range(len(y)): for j in range(len(y[i])): print(i, j, y[i][j].shape) print('--------------------------------------')
3.2 animegan我使用的判别器
import paddle.nn as nnimport paddle.nn.functional as Fimport paddle.tensor as tensorimport paddleclass AnimeDiscriminator(nn.Layer): def __init__(self, channel: int = 64, nblocks: int = 3) -> None: super().__init__() channel = channel // 2 last_channel = channel f = [ nn.Conv2D(3, channel, 3, stride=1, padding=1, bias_attr=False), nn.LeakyReLU(0.2) ] in_h = 256 for i in range(1, nblocks): f.extend([ nn.Conv2D(last_channel, channel * 2, 3, stride=2, padding=1, bias_attr=False), nn.LeakyReLU(0.2), nn.Conv2D(channel * 2, channel * 4, 3, stride=1, padding=1, bias_attr=False), nn.GroupNorm(1, channel * 4), nn.LeakyReLU(0.2) ]) last_channel = channel * 4 channel = channel * 2 in_h = in_h // 2 self.body = nn.Sequential(*f) self.head = nn.Sequential(*[ nn.Conv2D(last_channel, channel * 2, 3, stride=1, padding=1, bias_attr=False), nn.GroupNorm(1, channel * 2), nn.LeakyReLU(0.2), nn.Conv2D( channel * 2, 1, 3, stride=1, padding=1, bias_attr=False) ]) def forward(self, x): x = self.body(x) x = self.head(x) return x
3.3 我线稿上色(SCFT)使用的LSGAN判别器
# LSGAN Discriminatorclass Discriminator(nn.Layer): def __init__(self, ndf, nChannels): super(Discriminator, self).__init__() # input : (batch * nChannels * image width * image height) # Discriminator will be consisted with a series of convolution networks self.layer1 = nn.Sequential( # Input size : input image with dimension (nChannels)*64*64 # Output size: output feature vector with (ndf)*32*32 nn.Conv2D( in_channels = nChannels, out_channels = ndf, kernel_size = 4, stride = 2, padding = 1, bias_attr = False ), nn.BatchNorm2D(ndf), nn.LeakyReLU(0.2) ) self.layer2 = nn.Sequential( # Input size : input feature vector with (ndf)*32*32 # Output size: output feature vector with (ndf*2)*16*16 nn.Conv2D( in_channels = ndf, out_channels = ndf*2, kernel_size = 4, stride = 2, padding = 1, bias_attr = False ), nn.BatchNorm2D(ndf*2), nn.LeakyReLU(0.2) ) self.layer3 = nn.Sequential( # Input size : input feature vector with (ndf*2)*16*16 # Output size: output feature vector with (ndf*4)*8*8 nn.Conv2D( in_channels = ndf*2, out_channels = ndf*4, kernel_size = 4, stride = 2, padding = 1, bias_attr = False ), nn.BatchNorm2D(ndf*4), nn.LeakyReLU(0.2) ) self.layer4 = nn.Sequential( # Input size : input feature vector with (ndf*4)*8*8 # Output size: output feature vector with (ndf*8)*4*4 nn.Conv2D( in_channels = ndf*4, out_channels = ndf*8, kernel_size = 4, stride = 2, padding = 1, bias_attr = False ), nn.BatchNorm2D(ndf*8), nn.LeakyReLU(0.2) ) self.layer5 = nn.Sequential( # Input size : input feature vector with (ndf*8)*4*4 # Output size: output probability of fake/real image nn.Conv2D( in_channels = ndf*8, out_channels = 1, kernel_size = 4, stride = 1, padding = 0, bias_attr = False ), # nn.Sigmoid() -- Replaced with Least Square Loss ) def forward(self, x): out = self.layer1(x) out = self.layer2(out) out = self.layer3(out) out = self.layer4(out) out = self.layer5(out) return outx = paddle.randn([4,3,256,256])Discriminator(64,3)(x).shape
4. 模型初始化探讨
我们一般采取随机初始化策略,这是最为常见的方式,这可以打破模型参数的对称性,让模型可训练。如果模型参数都为全都初始化为同样的数值,那么反向传播计算梯度的时候,获得的梯度是相同的,这样就不合理了。 但是随机初始化参数也是有问题的,如果选择的随机分布不恰当,就会导致训练时模型优化陷入困境,具体而言,就是当神经网络结构更加复杂后,随机初始化参数方法会让复杂的神经网络结构后几层输出都接近为0,导致难以获得有效梯度,让模型训练陷入困境。
为了避免这个问题,提出了Xavier Initialization方法,该初始化参数的方法并不复杂,基本思路是保障输入输出的方差一致,这可以避免复杂模型输出后几层趋向于0,具体的做法就是将随机初始化的参数乘以缩放因子sqrt(1/layers_input_dims).但是当激活函数使用RELU的时候就会出现问题,随着训练的进行,后几层输出趋向于0,He Initializer可以解决这个问题。
He Initializer 方法基本思想是,假设ReLU网络每一层有一半的神经元被激活,另一半为0,为了保证输入 与输出的方差一致,需要在Xavier Initialization方法的基本上除以2.具体的做法就是将随机初始化的参数乘以缩放因子sqrt(2/layers_input_dims).
该截图来自于CSDN博客

下方代码是来自QQ群中看张牙舞爪大佬的分享,给他点个关注。
In [13]
import paddleimport paddle.nn as nn from paddle.nn.initializer import KaimingNormal,Constantdef weight_init(module): for n,m in module.named_children(): print("initialize:"+n) if isinstance(m,nn.Conv2D): KaimingNormal()(m.weight,m.weight.block) if m.bias is not None: Constant(0.0)(m.bias) elif isinstance(m,nn.Conv1D): KaimingNormal()(m.weight,m.weight.block) if m.bias is not None: Constant(0.0)(m.bias) elif isinstance(m,(nn.BatchNorm2D,nn.InstanceNorm2D)): Constant(1.0)(m.weight) Constant(3000.0)(m._variance) Constant(3000.0)(m._mean) if m.bias is not None: Constant(0.0)(m.bias) elif isinstance(m,nn.Linear): KaimingNormal()(m.weight,m.weight.block) if m.bias is not None: Constant(0.0)(m.bias) else: passclass Net(nn.Layer): def __init__(self): super(Net,self).__init__() self.conv = nn.Conv2D(3,5,3) self.bn = nn.BatchNorm2D(5,5) self.ac = nn.ReLU() def forward(self,x): x = self.conv(x) x = self.bn(x) x = self.ac(x) return xnet =Net()x = paddle.randn([4,3,256,256])net(x).shapeweight_init(net)print(net.conv.weight.shape)
initialize:convinitialize:bninitialize:ac[5, 3, 3, 3]
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/paddle/nn/layer/norm.py:653: UserWarning: When training, we now always track global mean and variance. "When training, we now always track global mean and variance.")
这里我为 以下截图来自于paddle源码,这里方便大家真正弄懂fan_in具体内容
KaimingNormal继承于MSRAInitializer,然后MSRAInitializer的f_in 为self._compute_fans(var)得到的。var就是conv2d里面的卷积核weight

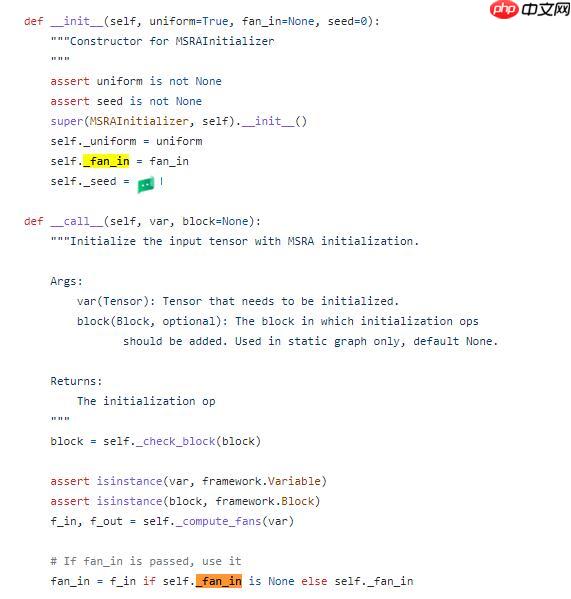
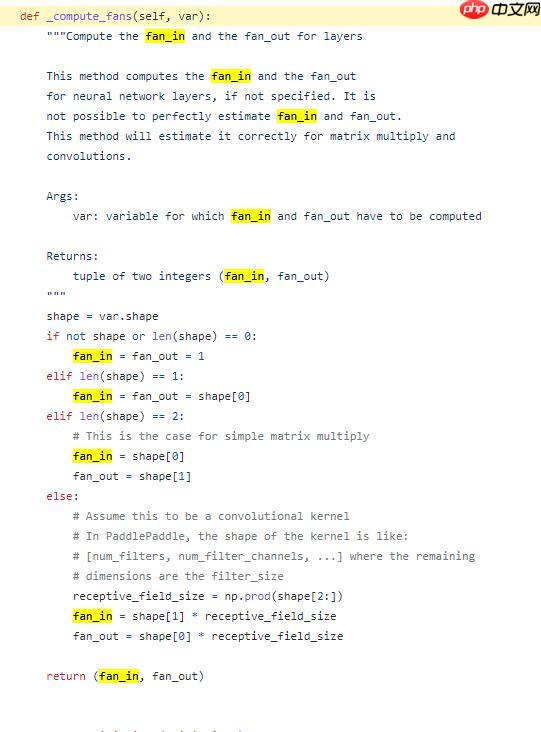
所以按照计算,fan_in为3*3*3等于27
以上就是CV GAN模型常用的一些东西,面向新人的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/41640.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 



























