
本文介绍如何用飞桨PARL强化学习框架在微软AirSim仿真环境实现智能驾驶。先说明环境配置,包括安装Win10、VS2019、虚幻引擎、AirSim等及验证方法;再讲用Python控制汽车的步骤;最后详述基于飞桨PARL的DQN算法实现,含代码清单、逻辑,还提及相关训练地图和视频。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
老司机开车了!用飞桨玩AirSim智能驾驶
https://www.bilibili.com/video/BV1UY4y1e7s5?share_source=copy_web
训练过程视频:PARL_AirSim_DQN.mp4
前言
PARL 是由百度大脑出品的、高性能、易用的国产强化学习(RL)框架。
微软AirSim环境是基于Unreal游戏引擎开发的,面向四轴无人机和无人驾驶汽车的虚拟现实环境。
AirSim目前star数高达12.9k,是微软公司最火的人工智能项目之一。
百度PARL的RL程序目前还无法在AirSim环境中运行。
本文实现了AirSim环境中运行基于PARL的强化学习算法。
一、环境要求与配置
win10操作系统Anaconda NavigatorPython3.7+PaddlePaddle2.xPARL2.x宽带网络+加速器内存16G或更多显卡NVIDIA RTX3060Ti以上
注册账号
注册微软统一账号:Win10系统菜单中找到windows 商店注册即可。注册Unreal账号:打开游戏引擎官网https://www.unrealengine.com/zh-CN 注册账号,并打通github.com认证授权(二次开发Unreal代码需要用到)。
下载软件
下载Visual Studio Community 2019
使用C++的桌面开发安装组件:Window 10 SDK(10.0.18362.0)
下载Epic Game Launcher并安装4.26以上版本的“虚幻引擎”
重启Epic Game Launcher并关联项目文件
下载AirSim源代码:git clone https://github.com/Microsoft/AirSim.git
本地编译AirSim源代码(Windows环境)
打开Developer Command Prompt for VS 2019,在项目根目录下输入命令:build.cmd检查插件目录:$ProjectRootUnrealPlugins 看插件是否生成。
验证安装
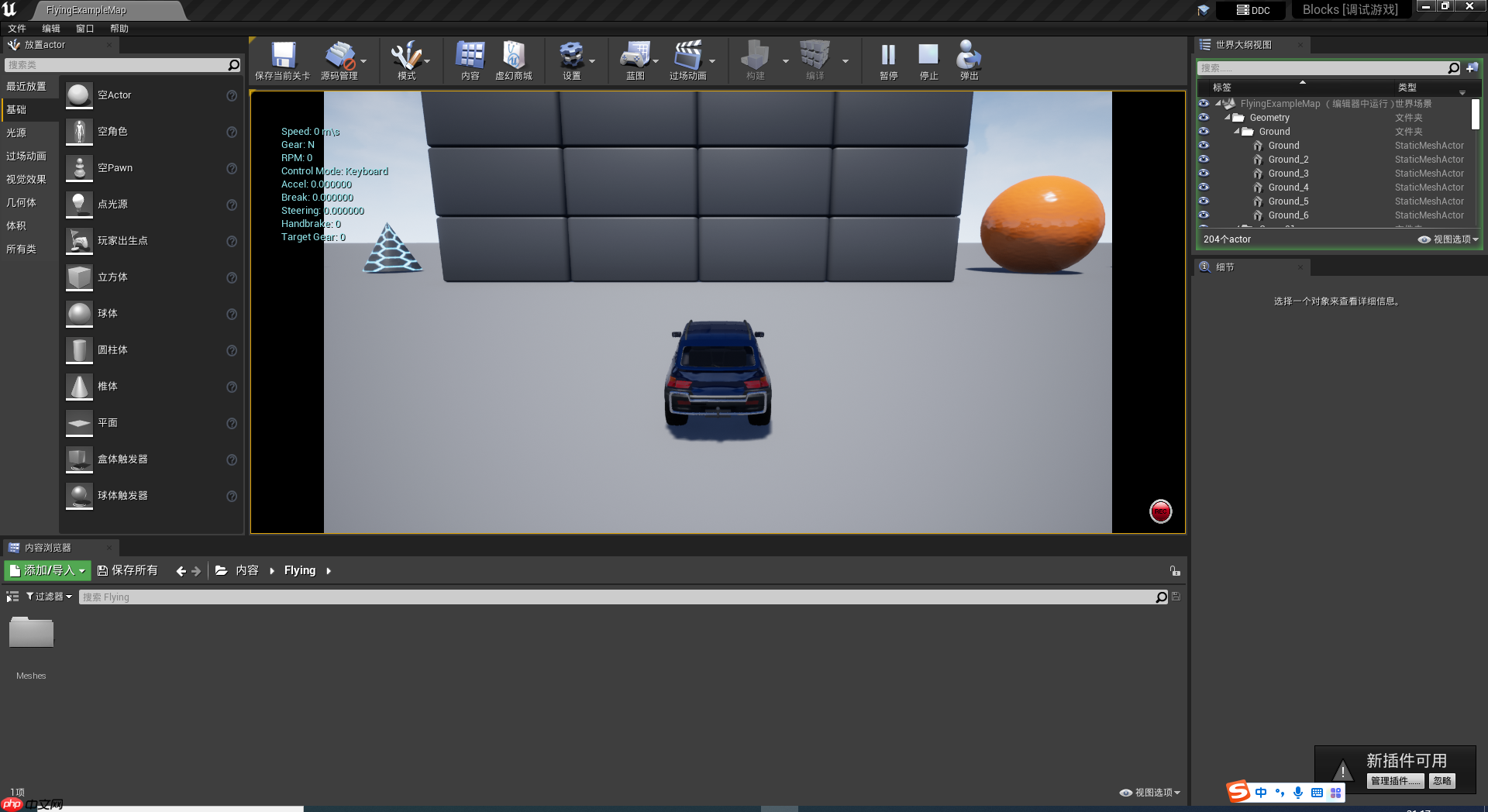
打开Developer Command Prompt for VS 2019,在$ProjectRootUnrealEnvironmentsBlocks目录下输入命令:update_from_git.bat弹出窗口点击确定,关联当前引擎进入目录双击Blocks.sln, VS2019自动启动。编译选项设置为:Development_Editor + Win64点击菜单“调试”–>“开始调试”,虚幻编辑器启动,看一遍教程点击“运行”,点击确定,出现下图表示AirSim环境安装成功!
二、使用Python控制汽车
1. 配置Anaconda环境
略
2. pip安装AirSim依赖包
# 安装Unreal和python之间的通讯协议 pip install msgpack-rpc-python # 安装airsim的python库 pip install airsim
3. 下载并安装Unreal 的 Landscape Mountains环境
请参考: 《下载与安装示例》章节,不再赘述。
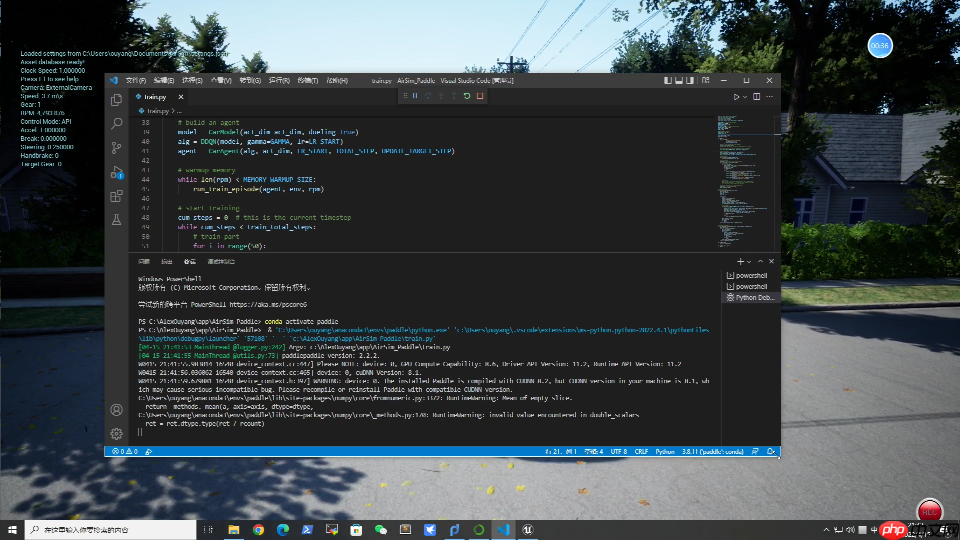
4. 启动VS Code,打开文件夹PythonClientcar,运行hello_car.py,效果如下:

三、使用飞桨PARL强化学习算法驾驶汽车
下载AirSim预编译的windows版本的训练地图: 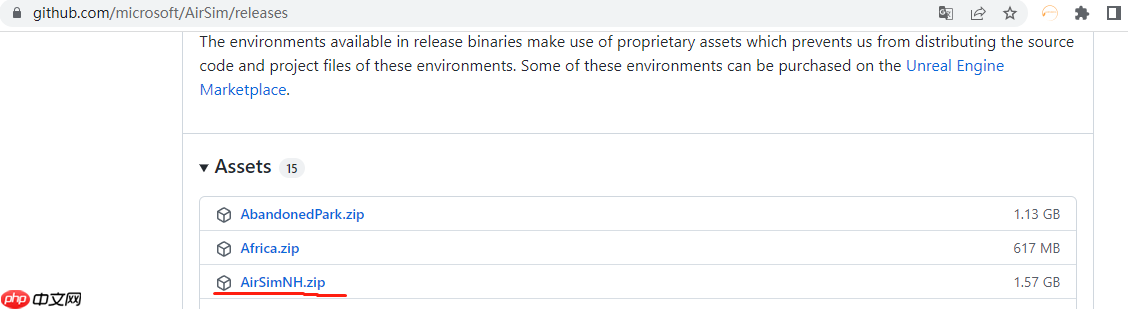
AirSim_Paddle│ setup_path.py││ agent.py│ model.py│ replay_memory.py│ train.py│ └─airgym │ __init__.py │ └─envs airsim_env.py car_env.py drone_env.py __init__.py
环境代码清单:
setup_path.py AirSim环境设置airgym目录__init__.py python包配置envs目录
airsim_env.py 基础环境配置
car_env.py 汽车训练环境配置
`__init__.py` python包配置
DQN算法代码清单:
train.py 主程序,训练DQN模型model.py 飞桨PARL三件套之一agent.py 飞桨PARL三件套之一replay_memory DQN系列算法的“记忆回放”
代码逻辑
初始化AirSim_Gym 游戏环境初始化飞桨PARL库的DQN算法预热“记忆回放”循环开始触发动作,训练自动驾驶
... while True: step += 1 # 获取记忆回放中的4帧 context = rpm.recent_obs() # 把当前动作返回帧加进去 context.append(obs) # 数组增加一维 context = np.stack(context, axis=0) # 选择一个动作,e-greedy算法 action = agent.sample(context) # 触发动作 next_obs, reward, isOver, _ = env.step(action) # 回写记忆回放 rpm.append(Experience(obs, action, reward, isOver)) # train model if (len(rpm) > MEMORY_WARMUP_SIZE) and (step % LEARN_FREQ == 0): # s,a,r,s',done (batch_all_obs, batch_action, batch_reward, batch_done) = rpm.sample_batch(BATCH_SIZE) # 抽帧 batch_obs = batch_all_obs[:, :CONTEXT_LEN, :, :] batch_next_obs = batch_all_obs[:, 1:, :, :] # 把抽出的帧放入learn方法中学习 train_loss = agent.learn(batch_obs, batch_action, batch_reward, batch_next_obs, batch_done) loss_lst.append(float(train_loss)) print("loss" + str(train_loss)) total_reward += reward obs = next_obs if isOver: break return total_reward, step, np.mean(loss_lst)
保存训练结果。
四、源代码和演示视频
训练视频:PARL_AirSim_DQN.mp4 完整源代码在work目录
五、项目总结
本项目在AirSim仿真环境中首次集成了飞桨PARL强化学习框架。
使用了飞桨PARL库自带的DQN系列算法,验证了AirSim环境中使用飞桨框架的可行性。
以上就是老司机开车了!用飞桨玩AirSim智能驾驶的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/51884.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 



























