
DPG是确定策略梯度 (Deterministic Policy Gradient, DPG)是最常用的连续控制方法。DPG是一种 Actor-Critic 方法,它有一个策略网络(演员),一个价值网络(评委)。策略网络控制智能体做运动,它基于状态 s 做出动作 a。价值网络不控制智能体,只是基于状态 s 给动作 a 打分,从而指导策略网络做出改进。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
DDPG
DPG是确定策略梯度 (Deterministic Policy Gradient, DPG)是最常用的连续控制方法。DPG是一种 Actor-Critic 方法,它有一个策略网络(演员),一个价值网络(评委)。策略网络控制智能体做运动,它基于状态 s 做出动作 a。价值网络不控制智能体,只是基于状态 s 给动作 a 打分,从而指导策略网络做出改进。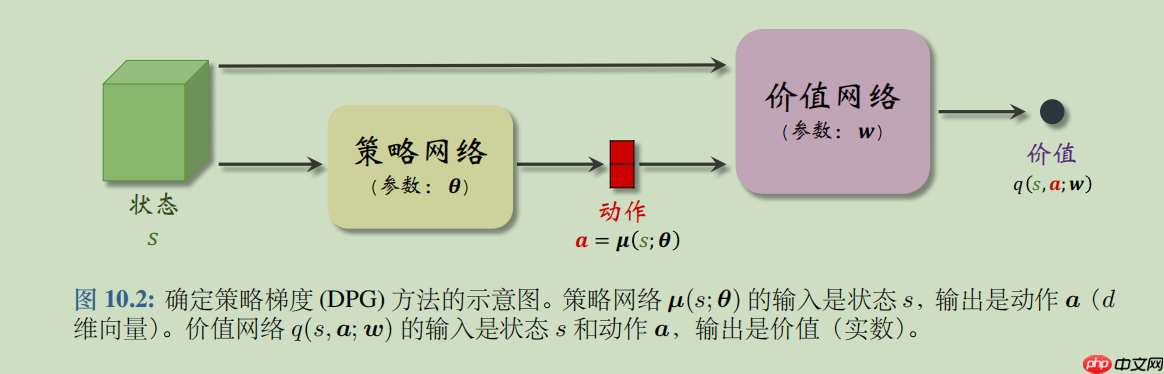
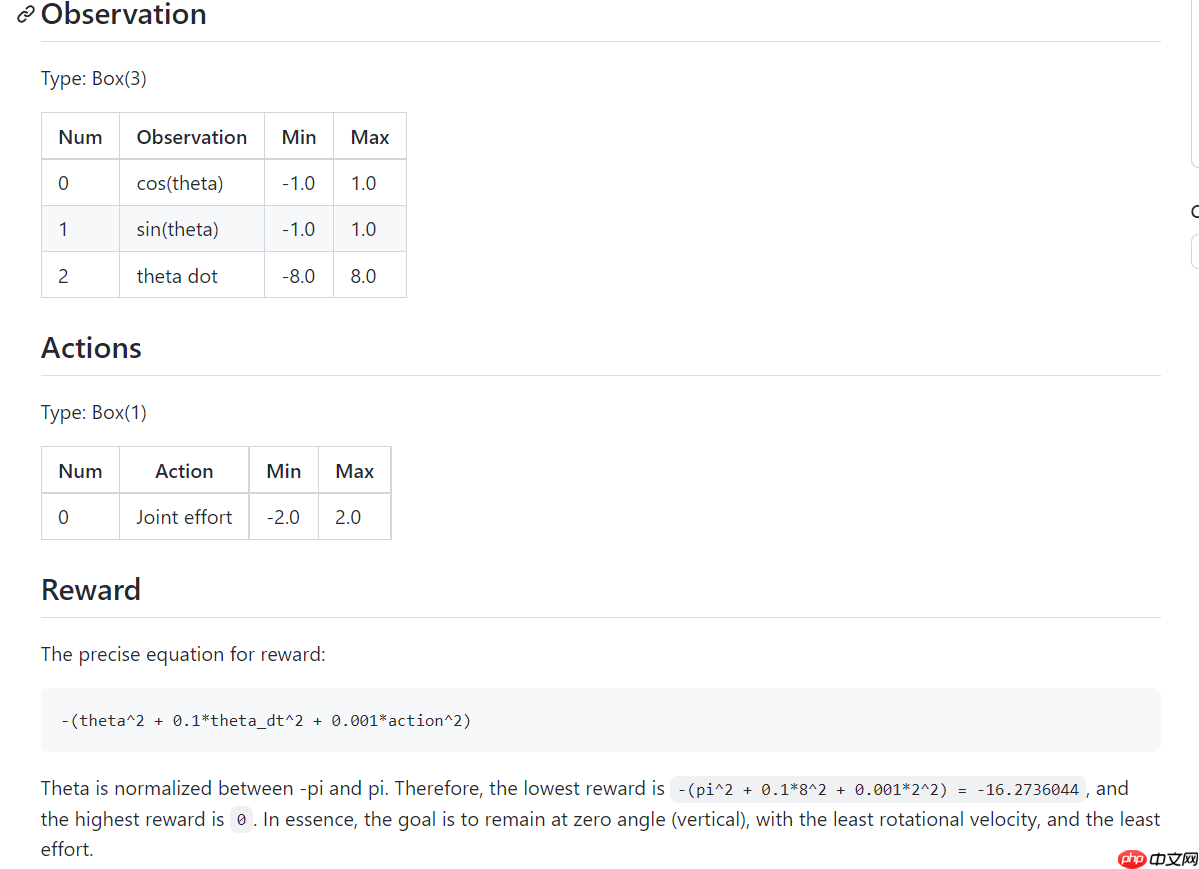
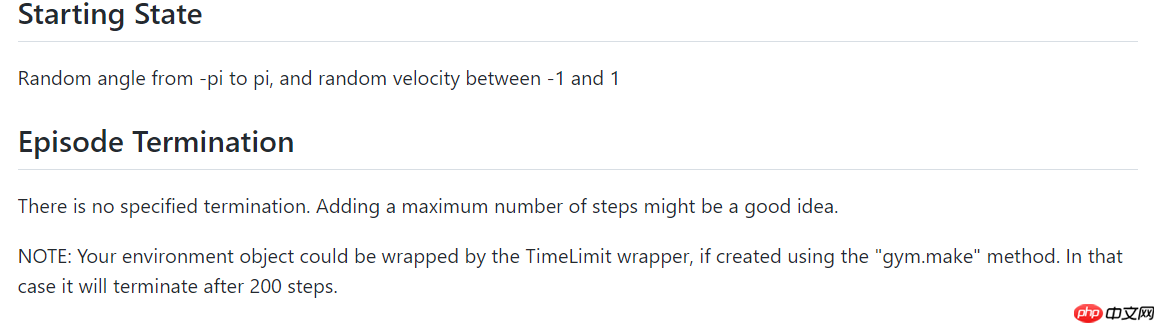
倒立摆问题:
倒立摆问题的经典的连续控制问题,钟摆以随机位置开始,目标是将其向上摆动,使其保持直立。其状态空间为3,动作空间为1(因为是连续的,有范围)。具体可以参考下图:
项目目标
使用深度神经网络DPG训练模型,也就是DDPG方法,使其在倒立摆环境中能够获得较好的奖励。
1.加载环境
In [1]
import gymimport paddlefrom itertools import countimport numpy as npfrom collections import dequeimport randomimport timefrom visualdl import LogWriter
2.定义网络
2.1 定义 【评论家】 网络结构
DDPG这种方法与Q学习紧密相关,可以看做是 【连续】动作空间的深度Q学习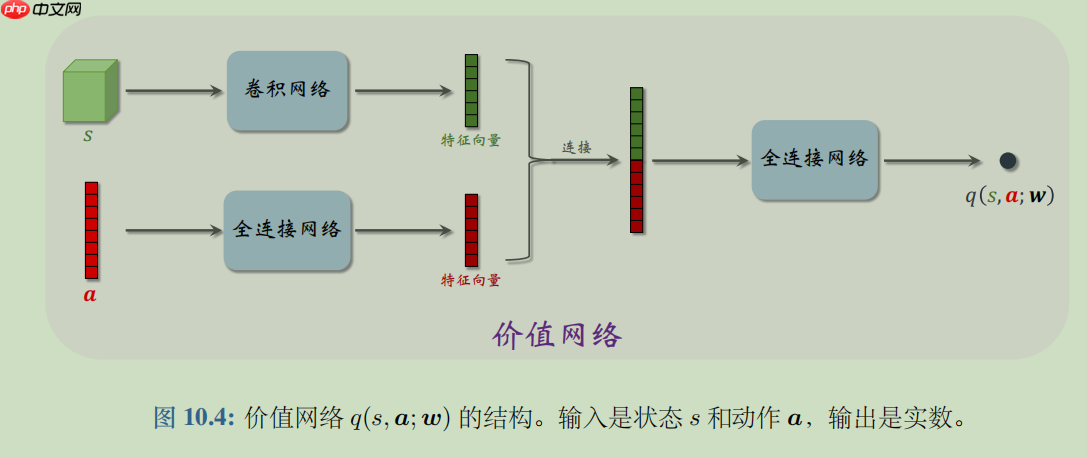
In [2]
class Critic(paddle.nn.Layer): def __init__(self): super(Critic,self).__init__() # 状态空间为3 self.fc1=paddle.nn.Linear(3,256) # 连接了动作空间,所以+1 self.fc2=paddle.nn.Linear(256+1,128) # self.fc3=paddle.nn.Linear(128,1) self.relu=paddle.nn.ReLU() def forward(self,x,a): x=self.relu(self.fc1(x)) x=paddle.concat((x,a),axis=1) x=self.relu(self.fc2(x)) x=self.fc3(x) return x
2.2 定义【演员】网络结构
为了使DDPG策略更好的进行探索,在训练时对其行为增加了干扰。原始DDPG论文建议使用时间相关的OU噪声,但最近的结果表明,【不相关的均值零高斯噪声】效果更好。后者更简单,首选。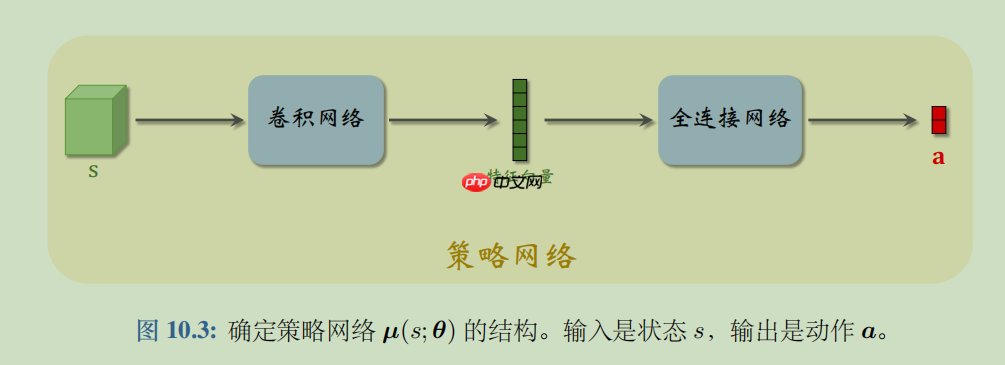
In [3]
class Actor(paddle.nn.Layer): def __init__(self,is_tranin=True): super(Actor,self).__init__() self.fc1=paddle.nn.Linear(3,256) self.fc2=paddle.nn.Linear(256,128) self.fc3=paddle.nn.Linear(128,1) self.relu=paddle.nn.ReLU() # max(0,x) self.tanh=paddle.nn.Tanh() # 双切正切曲线 (e^(x)-e^(-x))/(e^(x)+e^(-x)) self.noisy=paddle.distribution.Normal(0,0.2) self.is_tranin=is_tranin def forward(self,x): x=self.relu(self.fc1(x)) x=self.relu(self.fc2(x)) x=self.tanh(self.fc3(x)) return x def select_action(self,epsilon,state): state=paddle.to_tensor(state,dtype='float32').unsqueeze(0) # 创建一个上下文来禁用动态图梯度计算。在此模式下,每次计算的结果都将具有stop_gradient=True。 with paddle.no_grad(): # squeeze():会删除输入Tensor的Shape中尺寸为1的维度 # noisy抽样结果是1维的tensor action=self.forward(state).squeeze()+self.is_tranin*epsilon*self.noisy.sample([1]).squeeze(0) # paddle.clip:将输入的所有元素进行剪裁,使得输出元素限制在[min, max]内 # 动作空间是[-2,2] return 2*paddle.clip(action,-1,1).numpy()
2.3 定义 经验回放buffer(重播缓冲区)
这是智能体以前的经验,为了使算法具有稳定的行为,重播缓冲区应该足够大以包含广泛的经验。
如果仅使用最新的经验,则可能会过分拟合;如果使用过多的旧经验,则可能减慢模型的学习速度。
In [4]
class Memory(object): def __init__(self,memory_size): self.memory_size=memory_size self.buffer=deque(maxlen=self.memory_size) # 增加经验,因为经验数组是存放在deque中的,deque是双端队列, # 我们的deque指定了大小,当deque满了之后再add元素,则会自动把队首的元素出队 def add(self,experience): self.buffer.append(experience) def size(self): return len(self.buffer) # continuous=True则表示连续取batch_size个经验 def sample(self , batch_szie , continuous = True): # 选取的经验数目是否超过缓冲区内经验的数目 if batch_szie>len(self.buffer): batch_szie=len(self.buffer) # 是否连续取经验 if continuous: # random.randint(a,b) 返回[a,b]之间的任意整数 rand=random.randint(0,len(self.buffer)-batch_szie) return [self.buffer[i] for i in range(rand,rand+batch_szie)] else: # numpy.random.choice(a, size=None, replace=True, p=None) # a 如果是数组则在数组中采样;a如果是整数,则从[0,a-1]这个序列中随机采样 # size 如果是整数则表示采样的数量 # replace为True可以重复采样;为false不会重复 # p 是一个数组,表示a中每个元素采样的概率;为None则表示等概率采样 indexes=np.random.choice(np.arange(len(self.buffer)),size=batch_szie,replace=False) return [self.buffer[i] for i in indexes] def clear(self): self.buffer.clear()
3. 训练DPG模型
3.1 原始的DPG
3.1.1 定义环境、实例化模型
In [5]
env=gym.make('Pendulum-v0')actor=Actor()critic=Critic()
W1225 22:38:55.283380 289 device_context.cc:447] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 10.1, Runtime API Version: 10.1W1225 22:38:55.287163 289 device_context.cc:465] device: 0, cuDNN Version: 7.6.
3.1.2 定义优化器
In [6]
critic_optim=paddle.optimizer.Adam(parameters=critic.parameters(),learning_rate=3e-5)actor_optim=paddle.optimizer.Adam(parameters=actor.parameters(),learning_rate=1e-5)
3.1.3 定义超参数
In [7]
explore=50000epsilon=1 # 控制动作的抽样gamma=0.99tau=0.001memory_replay=Memory(50000)begin_train=Falsebatch_szie=32learn_steps=0epochs=100writer=LogWriter('./logs')
3.1.4 训练循环
In [8]
s_time=time.time()for epoch in range(0,epochs): start_time=time.time() state=env.reset() episode_reward=0 # 记录一个epoch的奖励综合 # 一个epoch进行2000的时间步 for time_step in range(2000): # 步骤1,策略网络根据初始状态做预测 action=actor.select_action(epsilon,state) next_state,reward,done,_=env.step([action]) episode_reward+=reward # 这一步在做什么? reward [-1,1] reward=(reward+8.2)/8.2 memory_replay.add((state,next_state,action,reward)) # 当经验回放数组中的存放一定量的经验才开始利用 if memory_replay.size()>1280: learn_steps+=1 if not begin_train: print('train begin!') begin_train=True # false : 不连续抽样 experiences=memory_replay.sample(batch_szie,False) batch_state,batch_next_state,batch_action,batch_reward=zip(*experiences) batch_state=paddle.to_tensor(batch_state,dtype='float32') batch_next_state=paddle.to_tensor(batch_next_state,dtype='float32') batch_action=paddle.to_tensor(batch_action,dtype='float32').unsqueeze(1) batch_reward=paddle.to_tensor(batch_reward,dtype='float32').unsqueeze(1) with paddle.no_grad(): # 策略网络做预测 at,at1=actor(batch_state),actor(batch_next_state) # 价值网络做预测 qt,qt1=critic(batch_state,batch_action),critic(batch_next_state,at1) # 计算TD目标 Q_traget=batch_reward+gamma*qt1 # TD误差函数 # 该OP用于计算预测值和目标值的均方差误差。(预测值,目标值) # reduction='mean',默认值,计算均值 critic_loss=paddle.nn.functional.mse_loss(qt,Q_traget) # 更新价值网络 critic_optim.clear_grad() critic_loss.backward() critic_optim.step() writer.add_scalar('critic loss',critic_loss.numpy(),learn_steps) # 更新策略网络 critic.eval() actor_loss=-critic(batch_state,at) actor_loss=actor_loss.mean() actor_optim.clear_grad() actor_loss.backward() actor_optim.step() critic.train() writer.add_scalar('actor loss',actor_loss.numpy(),learn_steps) # epsilon 逐渐减小 if epsilon>0: epsilon-=1/explore state=next_state writer.add_scalar('episode reward',episode_reward/2000,epoch) if epoch%10==0: print("Epoch:{}, episode reward is {:.3f}, use time is {:.3f}s ".format(epoch,episode_reward/2000,time.time()-start_time)) print("************ all time is {:.3f} h:".format((time.time()-s_time)/3600))
train begin!
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/paddle/tensor/creation.py:130: DeprecationWarning: `np.object` is a deprecated alias for the builtin `object`. To silence this warning, use `object` by itself. Doing this will not modify any behavior and is safe. Deprecated in NumPy 1.20; for more details and guidance: https://numpy.org/devdocs/release/1.20.0-notes.html#deprecations if data.dtype == np.object:
Epoch:0, episode reward is -6.058, use time is 4.891s Epoch:10, episode reward is -6.146, use time is 11.346s Epoch:20, episode reward is -6.144, use time is 11.830s Epoch:30, episode reward is -7.270, use time is 11.998s Epoch:40, episode reward is -6.148, use time is 11.932s Epoch:50, episode reward is -7.335, use time is 12.149s Epoch:60, episode reward is -6.411, use time is 12.301s Epoch:70, episode reward is -6.135, use time is 12.365s Epoch:80, episode reward is -6.768, use time is 12.136s Epoch:90, episode reward is -6.219, use time is 12.191s ************ all time is 0.329 h:
3.1.5 结果展示及分析
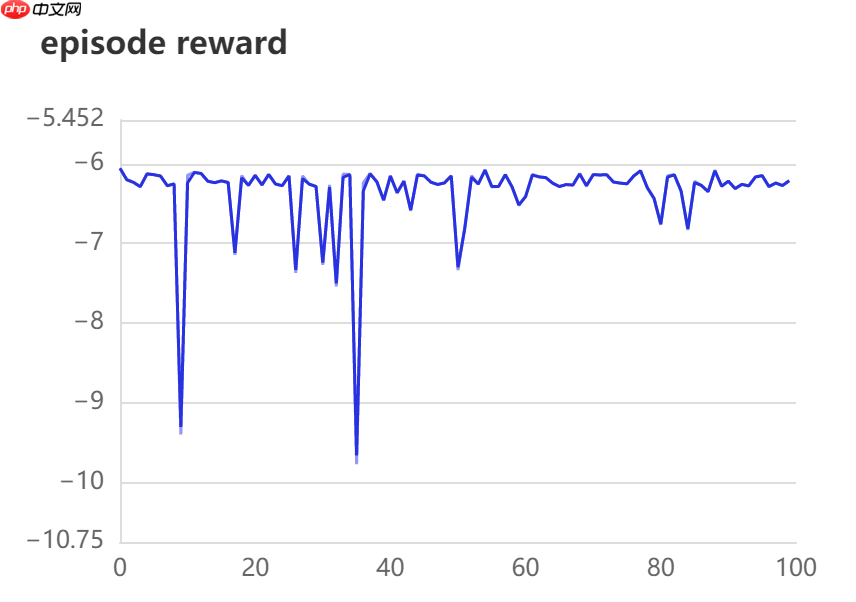
奖励在-6左右徘徊,说明网络效果不好(奖励越靠近0越好)。下面加入目标网络进行实验。
立即进入“豆包AI人工智官网入口”;
立即学习“豆包AI人工智能在线问答入口”;
3.2 加入目标网络的DPG
加入目标网络的作用是缓解高估问题,DPG中的高估来自两个方面:
自举:TD目标用价值网络算出来的,而它又被用于更新价值网络 q 本身,这属于自举。自举会造成偏差的传播。最大化:在训练策略网络的时候,我们希望策略网络计算出的动作得到价值网络尽量高的评价。在求解的过程中导致高估的出现。
自举与最大化的分析可参考王书的10.3.3节,分析的挺不错,但是推理比较复杂,这里就不再描述了,主要把结论记住就好。(陶渊明说读书要不求甚解,嘿嘿)
3.2.1 定义网络、优化器、超参数
这里我们重新定义了所有参数,即使前面定义过,因为有的参数是不断更新的(值变了),所有我们在这里统一重新定义一下。
In [9]
actor=Actor()critic=Critic()critic_optim=paddle.optimizer.Adam(parameters=critic.parameters(),learning_rate=3e-5)actor_optim=paddle.optimizer.Adam(parameters=actor.parameters(),learning_rate=1e-5)# 目标网络,缓解自举造成的高估问题actor_target=Actor()critic_target=Critic()explore=50000epsilon=1 # 控制动作的抽样gamma=0.99tau=0.001memory_replay=Memory(50000)begin_train=Falsebatch_szie=32learn_steps=0epochs=100twriter=LogWriter('./newlogs')
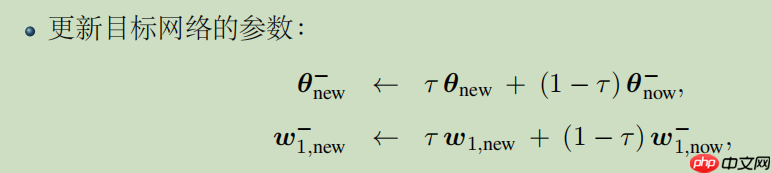
3.2.2 定义目标网络的更新函数
更新目标网络参数,公式如下:
In [10]
def soft_update(target,source,tau): # zip() 函数用于将可迭代的对象作为参数,将对象中对应的元素打包成一个个元组,然后返回由这些元组组成的列表。 for target_param,param in zip(target.parameters(),source.parameters()): target_param.set_value(target_param*(1.0-tau)+param*tau)
3.2.3 训练过程
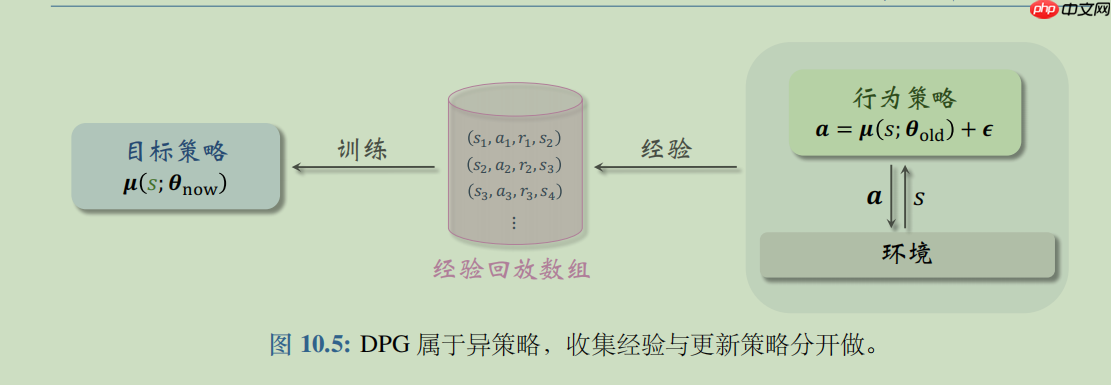
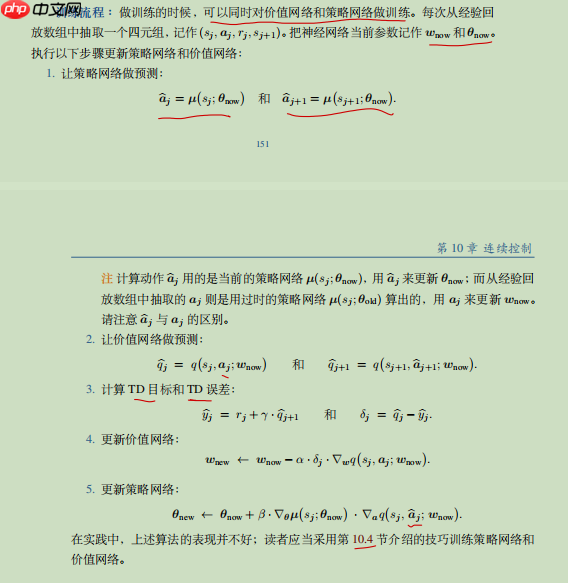
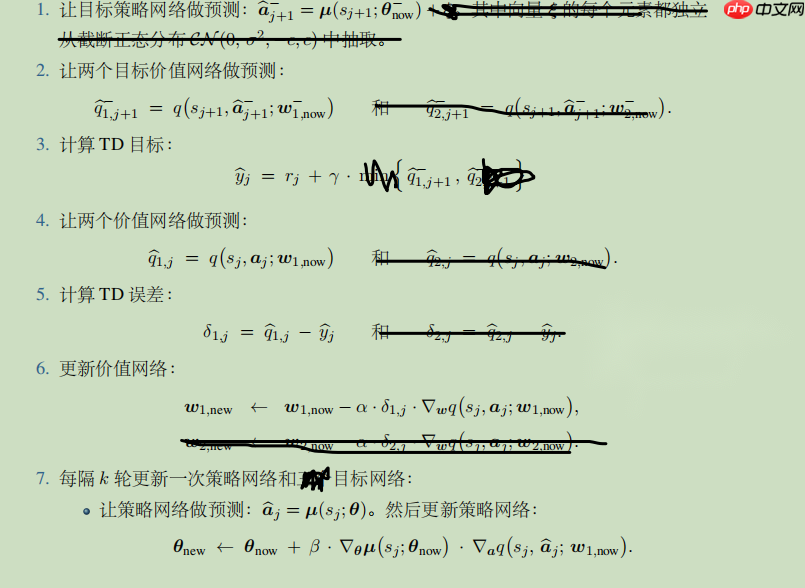
策略网络根据当前状态进行动作选择执行该动作,得到新状态,奖励(旧状态,动作,奖励,新状态) 四元组进入经验回放数组当经验数组内四元组数量大于阈值则选取一部分经验更新网络:从经验数组中随机抽取四元组(s_t,a_t,r_t,s_t+1)目标策略网络做预测,输入是 s_t+1 预测出下一个动作a_t+1目标价值网络做预测,输入是s_t+1和a_t+1,输出是q_tt计算TD目标,y= r_t+gamma*q_tt价值网络做预测,输入是s_t,a_t,输出是q_t计算TD误差,error=q_t-y更新价值网络更新策略网络更新目标网络
In [11]
s_time=time.time()k=0for epoch in range(0,epochs): start_time=time.time() state=env.reset() episode_reward=0 # 记录一个epoch的奖励综合 # 一个epoch进行2000的时间步 for time_step in range(2000): # 步骤1,策略网络根据初始状态做预测 action=actor.select_action(epsilon,state) next_state,reward,done,_=env.step([action]) episode_reward+=reward # reward缩放到 [-1,1] reward=(reward+8.2)/8.2 memory_replay.add((state,next_state,action,reward)) # 当经验回放数组中的存放一定量的经验才开始利用 if memory_replay.size()>1280: learn_steps+=1 if not begin_train: print('train begin!') begin_train=True # false : 不连续抽样 # 从经验数组中随机抽取四元组(s_t,a_t,r_t,s_t+1) experiences=memory_replay.sample(batch_szie,False) batch_state,batch_next_state,batch_action,batch_reward=zip(*experiences) batch_state=paddle.to_tensor(batch_state,dtype='float32') batch_next_state=paddle.to_tensor(batch_next_state,dtype='float32') batch_action=paddle.to_tensor(batch_action,dtype='float32').unsqueeze(1) batch_reward=paddle.to_tensor(batch_reward,dtype='float32').unsqueeze(1) # 目标策略网络做预测,输入是 s_t+1 预测出下一个动作a_t+1 # 目标价值网络做预测,输入是s_t+1和a_t+1,输出是q_tt # 计算TD目标,y= r_t+gamma*q_tt with paddle.no_grad(): # Q_next traget是TD目标 Q_next=critic_target(batch_next_state,actor_target(batch_next_state)) Q_traget=batch_reward+gamma*Q_next # 价值网络做预测,输入是s_t,a_t,输出是q_t # 计算TD误差,error=q_t-y # 误差函数 # 该OP用于计算预测值和目标值的均方差误差。(预测值,目标值) # reduction='mean',默认值,计算均值 critic_loss=paddle.nn.functional.mse_loss(critic(batch_state,batch_action),Q_traget) # 更新价值网络 critic_optim.clear_grad() critic_loss.backward() critic_optim.step() twriter.add_scalar('critic loss',critic_loss.numpy(),learn_steps) if k==5: #更新策略网络 # 使用Critic网络给定值的平均值来评价Actor网络采取的行动。最大化该值。 # 更新Actor()网络,对于一个给定状态,它产生的动作尽量让Critic网络给出高的评分 critic.eval() actor_loss=-critic(batch_state,actor(batch_state)) actor_loss=actor_loss.mean() actor_optim.clear_grad() actor_loss.backward() actor_optim.step() critic.train() twriter.add_scalar('actor loss',actor_loss.numpy(),learn_steps) # 更新目标网络 soft_update(actor_target,actor,tau) soft_update(critic_target,critic,tau) k=0 else: k+=1 # epsilon 逐渐减小 if epsilon>0: epsilon-=1/explore state=next_state twriter.add_scalar('episode reward',episode_reward/2000,epoch) if epoch%10==0: print("Epoch:{}, episode reward is {:.3f}, use time is {:.3f}s ".format(epoch,episode_reward/2000,time.time()-start_time)) print("************ all time is {:.3f} h:".format((time.time()-s_time)/3600))
train begin!Epoch:0, episode reward is -8.726, use time is 4.682s Epoch:10, episode reward is -7.607, use time is 10.381s Epoch:20, episode reward is -7.419, use time is 11.115s Epoch:30, episode reward is -6.317, use time is 11.464s Epoch:40, episode reward is -8.340, use time is 11.308s Epoch:50, episode reward is -8.306, use time is 11.535s Epoch:60, episode reward is -8.276, use time is 11.356s Epoch:70, episode reward is -1.401, use time is 11.539s Epoch:80, episode reward is -8.145, use time is 11.346s Epoch:90, episode reward is -0.076, use time is 11.321s ************ all time is 0.308 h:
3.2.4 加入目标网络后的结果展示
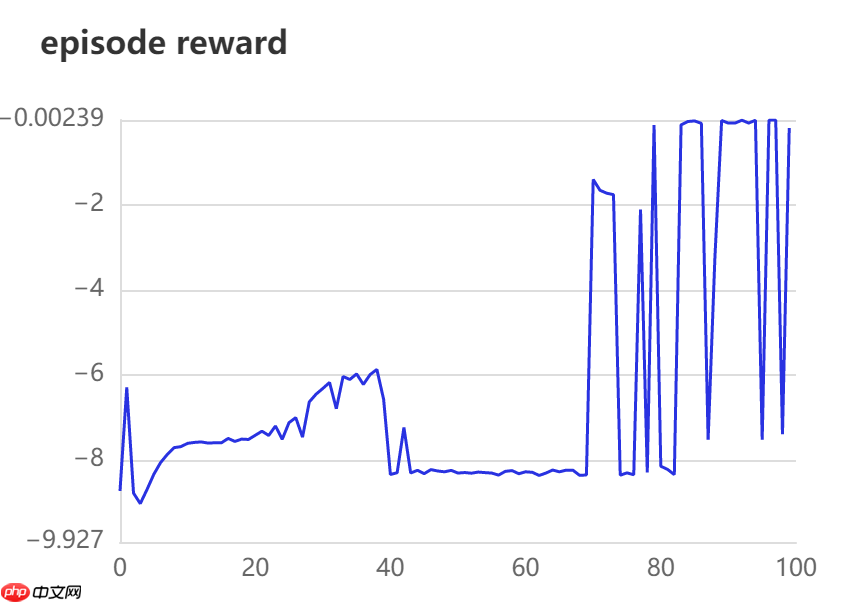
奖励在训练的后期可以达到较好的奖励值,但是波动较大。但是与没有加入目标网络的模型相比较结果有所进步。后续有时间继续优化。
以上就是【强化学习】DDPG : 强化学习之倒立摆的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/52594.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 



























