本文介绍DDRNet语义分割模型,其属双路径结构,含高低分辨率两个分支,分别保存细节与提取上下文信息,通过Bilateral fusion模块融合特征,引入DAPPM模块和辅助损失。复现的DDRNet – 23在Cityscapes验证集mIoU达79.85%,优于目标值,已被paddleseg收录。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

【第六期论文复现赛-语义分割】Deep Dual-resolution Networks for Real-time and Accurate Semantic Segmentation of Road Scenes
paper:Deep Dual-resolution Networks for Real-time and Accurate Semantic Segmentation of Road Scenes
github:https://github.com/ydhongHIT/DDRNet
复现地址:https://github.com/justld/DDRNet_paddle
轻量级语义分割模型大致分为2类:Encoder-Decoder结构(如ESPNet)和two-pathway(如BiSeNet)。类似two-pathway结构,DDRNet使用Dual-resolution,并引入DAPPM( Deep Aggregation Pyramid Pooling Module)模块。在Cityscapes测试集、GPU 2080Ti,DDRNet-23-slim达到102FPS,miou77.4%。本项目复现了DDRNet_23,在cityscapes val miou 为79.85%,该算法已被paddleseg收录。
模型预测效果(来自cityscapes val):
一、几种语义分割模型结构
下图为语义分割模型的几种结构:
(a)空洞卷积:通过空洞卷积增加模型的感受野,保留高分辨率的特征图降低信息损失;(Deeplab系列)
(b)Encoder-Decoder:通过Encoder(backbone)提取不同分辨率的特征图,然后将不同分辨率的特征图上采样融合,可以通过更换backbone来控制模型的大小;(UNet、ESPNet)
(c)Two-pathway:模型包含2个path,一个path负责提取上下文语义信息,一个path保留细节信息,然后将2个path输出融合。(BiSeNetV1、V2)
(d)DDRNet结构,具体见下文。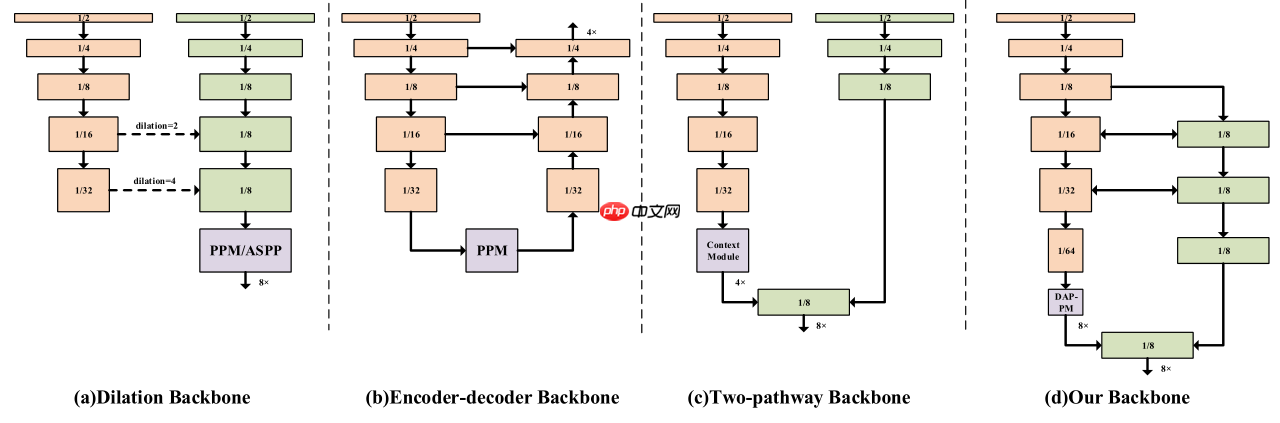
二、网络结构
DDRNet网络结构如下图所示,模型包含2个分支,上面的分支分辨率较高,保存细节信息,下面的分支分辨率较低,用来提取上下文信息(使用了DAPPM模块增加其感受野),分支间特征融合使用Bilateral fusion模块,另外引入辅助损失函数。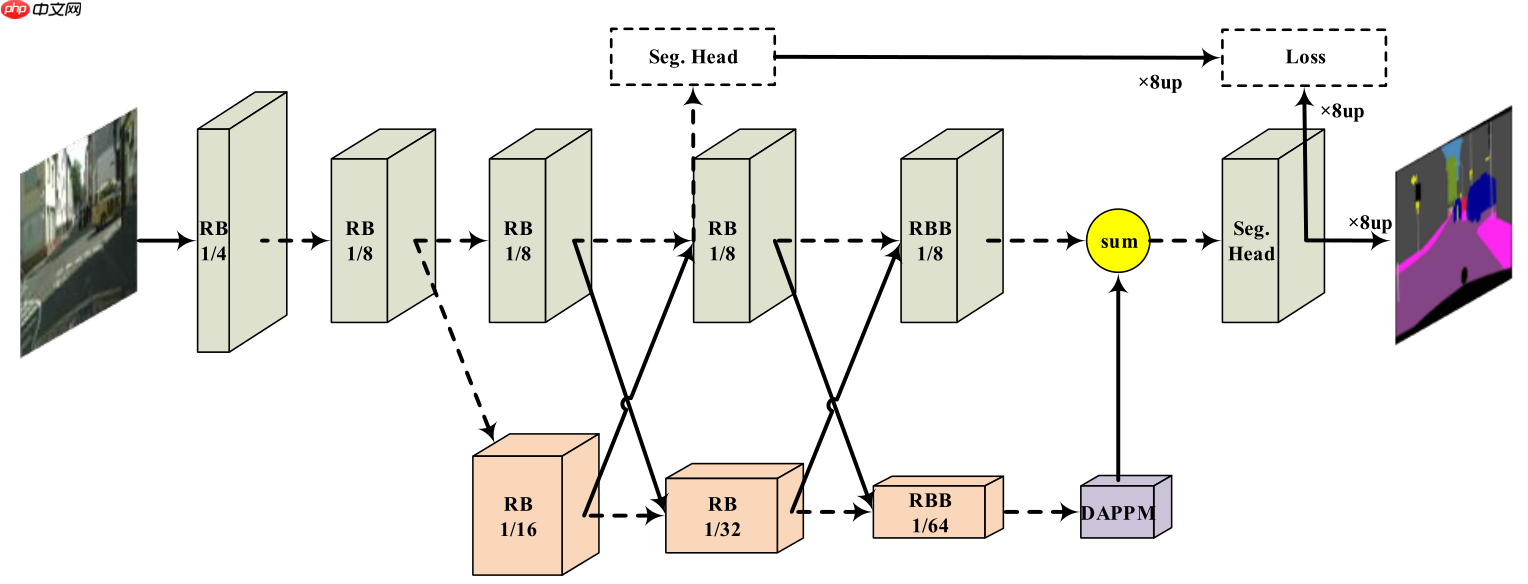
三、Bilateral fusion
DDRNet为了结合不同分辨率的特征图,使用了Bilateral fusion模块,不同分支不同分辨率的特征图分别通过上采样下采样后相加,保持自身分辨率不变的同时融合了另一分支的信息。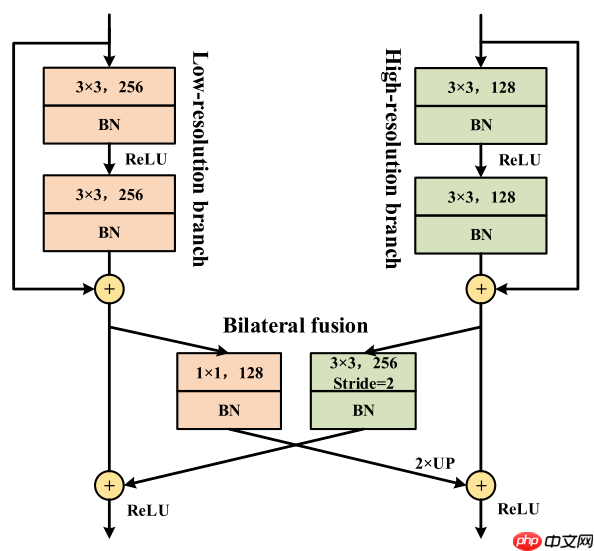
四、 Deep Aggregation Pyramid Pooling Module(DAPPM)
DAPPM为了获得多尺度信息,对输入特征图进行池化(核大小和步长不同),然后将不同大小的特征图上采样融合。
PS:池化部分类似PSPNet提出的Pyramid Pooling Module,整体结构类似ESPNetV2提出的EESP模块,具体可参考相关论文。 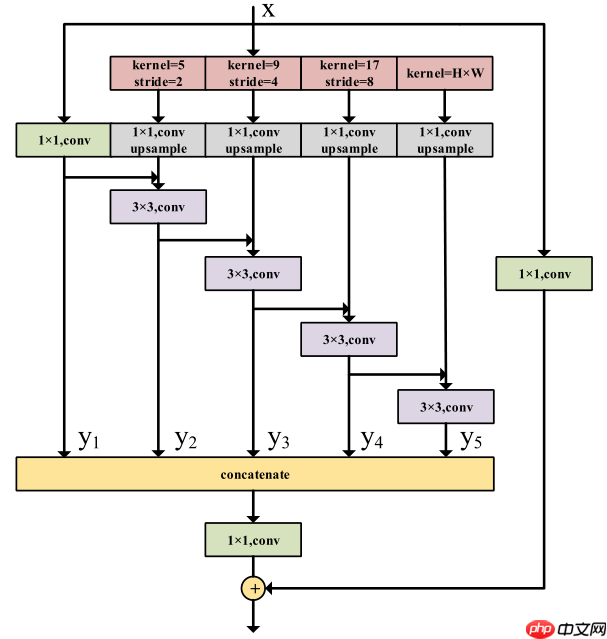
pytorch源码:
class DAPPM(nn.Module): def __init__(self, inplanes, branch_planes, outplanes): super(DAPPM, self).__init__() self.scale1 = nn.Sequential(nn.AvgPool2d(kernel_size=5, stride=2, padding=2), BatchNorm2d(inplanes, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(inplanes, branch_planes, kernel_size=1, bias=False), ) self.scale2 = nn.Sequential(nn.AvgPool2d(kernel_size=9, stride=4, padding=4), BatchNorm2d(inplanes, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(inplanes, branch_planes, kernel_size=1, bias=False), ) self.scale3 = nn.Sequential(nn.AvgPool2d(kernel_size=17, stride=8, padding=8), BatchNorm2d(inplanes, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(inplanes, branch_planes, kernel_size=1, bias=False), ) self.scale4 = nn.Sequential(nn.AdaptiveAvgPool2d((1, 1)), BatchNorm2d(inplanes, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(inplanes, branch_planes, kernel_size=1, bias=False), ) self.scale0 = nn.Sequential( BatchNorm2d(inplanes, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(inplanes, branch_planes, kernel_size=1, bias=False), ) self.process1 = nn.Sequential( BatchNorm2d(branch_planes, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(branch_planes, branch_planes, kernel_size=3, padding=1, bias=False), ) self.process2 = nn.Sequential( BatchNorm2d(branch_planes, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(branch_planes, branch_planes, kernel_size=3, padding=1, bias=False), ) self.process3 = nn.Sequential( BatchNorm2d(branch_planes, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(branch_planes, branch_planes, kernel_size=3, padding=1, bias=False), ) self.process4 = nn.Sequential( BatchNorm2d(branch_planes, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(branch_planes, branch_planes, kernel_size=3, padding=1, bias=False), ) self.compression = nn.Sequential( BatchNorm2d(branch_planes * 5, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(branch_planes * 5, outplanes, kernel_size=1, bias=False), ) self.shortcut = nn.Sequential( BatchNorm2d(inplanes, momentum=bn_mom), nn.ReLU(inplace=True), nn.Conv2d(inplanes, outplanes, kernel_size=1, bias=False), ) def forward(self, x): #x = self.downsample(x) width = x.shape[-1] height = x.shape[-2] x_list = [] x_list.append(self.scale0(x)) x_list.append(self.process1((F.interpolate(self.scale1(x), size=[height, width], mode='bilinear')+x_list[0]))) x_list.append((self.process2((F.interpolate(self.scale2(x), size=[height, width], mode='bilinear')+x_list[1])))) x_list.append(self.process3((F.interpolate(self.scale3(x), size=[height, width], mode='bilinear')+x_list[2]))) x_list.append(self.process4((F.interpolate(self.scale4(x), size=[height, width], mode='bilinear')+x_list[3]))) out = self.compression(torch.cat(x_list, 1)) + self.shortcut(x) return out
五、实验结果
cityscapes在cityscapes验证集和测试集上的表现如下: 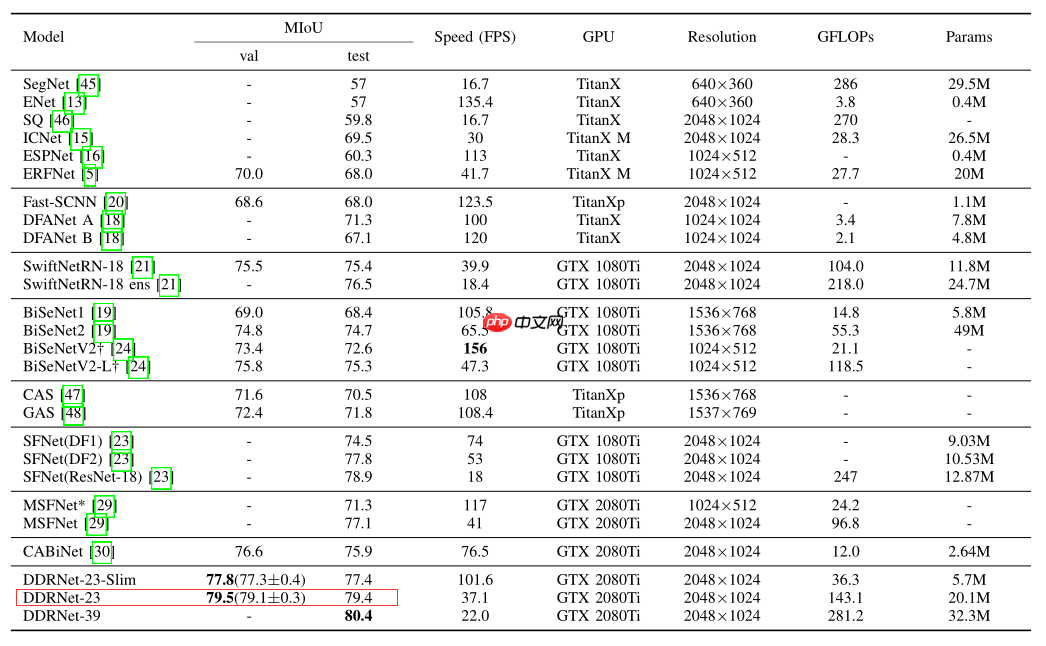
六、复现结果
本次复现的目标是DDRNet-23 在cityscapes验证集 mIOU= 79.5%,复现的miou为79.85%。详情见下表:
DDRNet_23-1024×102412000079.85%80.11%80.44%model|log|vdl
七、快速体验
运行以下cell,快速体验DDRNet-23。
In [ ]
# step 1: unzip data%cd ~/PaddleSeg/!mkdir data!tar -xf ~/data/data64550/cityscapes.tar -C data/%cd ~/
In [ ]
# step 2: 训练%cd ~/PaddleSeg!python train.py --config configs/ddrnet/ddrnet23_cityscapes_1024x1024_120k.yml --do_eval --use_vdl --log_iter 100 --save_interval 4000 --save_dir output
In [ ]
# step 3: val%cd ~/PaddleSeg/!python val.py --config configs/ddrnet/ddrnet23_cityscapes_1024x1024_120k.yml --model_path output/best_model/model.pdparams
In [ ]
# step 4: val flip%cd ~/PaddleSeg/!python val.py --config configs/ddrnet/ddrnet23_cityscapes_1024x1024_120k.yml --model_path output/best_model/model.pdparams --aug_eval --flip_horizontal
In [ ]
# step 5: val ms flip %cd ~/PaddleSeg/!python val.py --config configs/ddrnet/ddrnet23_cityscapes_1024x1024_120k.yml --model_path output/best_model/model.pdparams --aug_eval --scales 0.75 1.0 1.25 --flip_horizontal
In [ ]
# step 6: 预测, 预测结果在~/PaddleSeg/output/result文件夹内%cd ~/PaddleSeg/!python predict.py --config configs/ddrnet/ddrnet23_cityscapes_1024x1024_120k.yml --model_path output/best_model/model.pdparams --image_path data/cityscapes/leftImg8bit/val/frankfurt/frankfurt_000000_000294_leftImg8bit.png --save_dir output/result
In [ ]
# step 7: export%cd ~/PaddleSeg!python export.py --config configs/ddrnet/ddrnet23_cityscapes_1024x1024_120k.yml --model_path output/best_model/model.pdparams --save_dir output
In [ ]
# test tipc 1: prepare data%cd ~/PaddleSeg/!bash test_tipc/prepare.sh ./test_tipc/configs/ddrnet/train_infer_python.txt 'lite_train_lite_infer'
In [ ]
# test tipc 2: pip install%cd ~/PaddleSeg/test_tipc/!pip install -r requirements.txt
In [ ]
# test tipc 3: 安装auto_log%cd ~/!git clone https://github.com/LDOUBLEV/AutoLog %cd AutoLog/!pip3 install -r requirements.txt!python3 setup.py bdist_wheel!pip3 install ./dist/auto_log-1.2.0-py3-none-any.whl
In [ ]
# test tipc 4: test train inference%cd ~/PaddleSeg/!bash test_tipc/test_train_inference_python.sh ./test_tipc/configs/ddrnet/train_infer_python.txt 'lite_train_lite_infer'
以上就是【第六期论文复现赛-语义分割】DDRNet的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/55256.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫