本文介绍了Swin Transformer模型的代码复现情况。作者完成了BackBone代码迁移,ImageNet 1k预训练模型可用且精度对齐,模型代码和ImageNet 22k预训练模型将更新到PPIM项目。文中展示了模型组网代码,包括窗口划分、注意力机制等模块,还提供了预设模型及精度验证结果,Swin-T在验证集上top1准确率达81.19%。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

引入
没有感情的论文复现机器又来整活了这次整一个前两天代码新鲜出炉的模型 Swin Transformer代码已经跑通,暂时只完成 BackBone 代码的迁移,ImageNet 1k 数据集预训练模型可用,精度对齐模型代码和 ImageNet 22k 预训练模型这几天会更新到 PPIM 项目中去
参考资料
论文:Swin Transformer: Hierarchical Vision Transformer using Shifted Windows
官方项目:microsoft/Swin-Transformer
才疏学浅,只会写写代码,就不班门弄斧解读这论文了
具体详解可以参考 @长风破浪会有时 大佬发布的项目 Swin Transformer,之前大佬写的 RepVGG 和 ReXNet 模型解析太强了
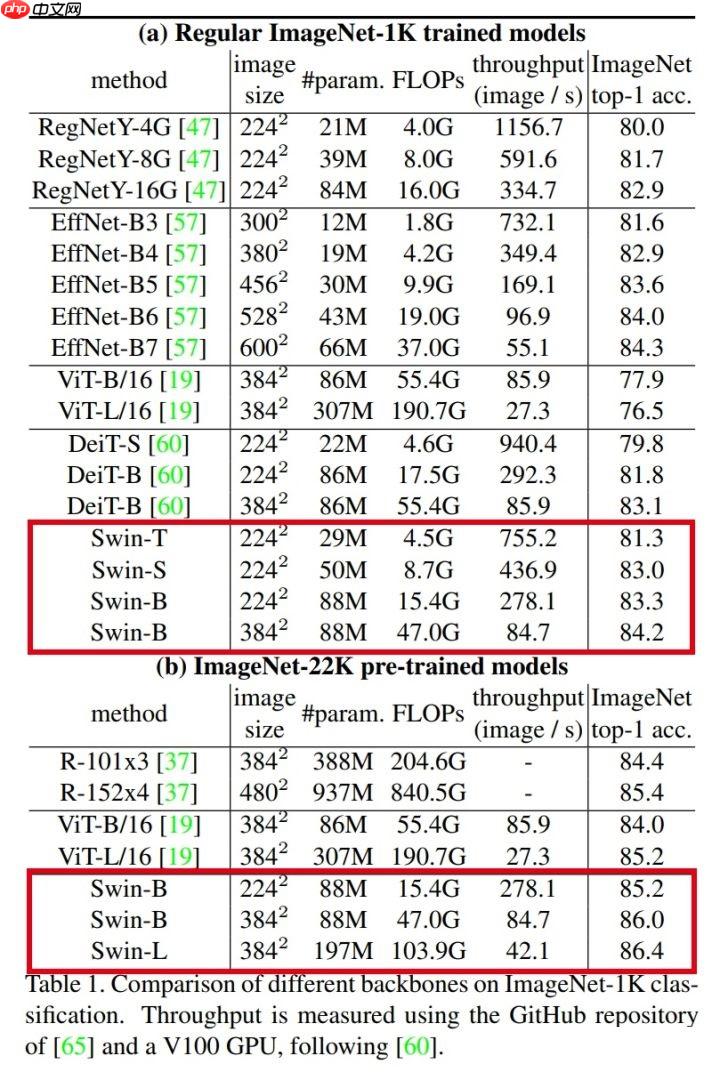
模型精度细节:
构建模型
依然需要依赖 PPIM 进行模型搭建
安装依赖
In [ ]
# 安装 PPIM!pip install ppim
导入必要的包
In [1]
import numpy as npimport paddleimport paddle.nn as nnimport paddle.vision.transforms as Tfrom ppim.models.vit import Mlpfrom ppim.models.common import to_2tuplefrom ppim.models.common import DropPath, Identityfrom ppim.models.common import trunc_normal_, zeros_, ones_
模型组网
In [2]
def window_partition(x, window_size): """ Args: x: (B, H, W, C) window_size (int): window size Returns: windows: (num_windows*B, window_size, window_size, C) """ B, H, W, C = x.shape x = x.reshape((B, H // window_size, window_size, W // window_size, window_size, C)) windows = x.transpose((0, 1, 3, 2, 4, 5)).reshape( (-1, window_size, window_size, C)) return windowsdef window_reverse(windows, window_size, H, W): """ Args: windows: (num_windows*B, window_size, window_size, C) window_size (int): Window size H (int): Height of image W (int): Width of image Returns: x: (B, H, W, C) """ B = int(windows.shape[0] / (H * W / window_size / window_size)) x = windows.reshape( (B, H // window_size, W // window_size, window_size, window_size, -1)) x = x.transpose((0, 1, 3, 2, 4, 5)).reshape((B, H, W, -1)) return xclass WindowAttention(nn.Layer): r""" Window based multi-head self attention (W-MSA) module with relative position bias. It supports both of shifted and non-shifted window. Args: dim (int): Number of input channels. window_size (tuple[int]): The height and width of the window. num_heads (int): Number of attention heads. qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set attn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0 proj_drop (float, optional): Dropout ratio of output. Default: 0.0 """ def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.): super().__init__() self.dim = dim self.window_size = window_size # Wh, Ww self.num_heads = num_heads head_dim = dim // num_heads self.scale = qk_scale or head_dim ** -0.5 # define a parameter table of relative position bias self.relative_position_bias_table = self.create_parameter( shape=((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads), default_initializer=zeros_ ) # 2*Wh-1 * 2*Ww-1, nH self.add_parameter("relative_position_bias_table", self.relative_position_bias_table) # get pair-wise relative position index for each token inside the window coords_h = paddle.arange(self.window_size[0]) coords_w = paddle.arange(self.window_size[1]) coords = paddle.stack(paddle.meshgrid( [coords_h, coords_w])) # 2, Wh, Ww coords_flatten = paddle.flatten(coords, 1) # 2, Wh*Ww relative_coords = coords_flatten.unsqueeze(-1) - coords_flatten.unsqueeze(1) # 2, Wh*Ww, Wh*Ww relative_coords = relative_coords.transpose( (1, 2, 0)) # Wh*Ww, Wh*Ww, 2 relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0 relative_coords[:, :, 1] += self.window_size[1] - 1 relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1 relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww self.register_buffer("relative_position_index", relative_position_index) self.qkv = nn.Linear(dim, dim * 3, bias_attr=qkv_bias) self.attn_drop = nn.Dropout(attn_drop) self.proj = nn.Linear(dim, dim) self.proj_drop = nn.Dropout(proj_drop) trunc_normal_(self.relative_position_bias_table) self.softmax = nn.Softmax(axis=-1) def forward(self, x, mask=None): """ Args: x: input features with shape of (num_windows*B, N, C) mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None """ B_, N, C = x.shape qkv = self.qkv(x).reshape((B_, N, 3, self.num_heads, C // self.num_heads)).transpose((2, 0, 3, 1, 4)) q, k, v = qkv[0], qkv[1], qkv[2] q = q * self.scale attn = q.matmul(k.transpose((0, 1, 3, 2))) relative_position_bias = paddle.index_select( self.relative_position_bias_table, self.relative_position_index.reshape((-1,)), axis=0).reshape( (self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1)) relative_position_bias = relative_position_bias.transpose((2, 0, 1)) attn = attn + relative_position_bias.unsqueeze(0) if mask is not None: nW = mask.shape[0] attn = attn.reshape( (B_ // nW, nW, self.num_heads, N, N) ) + mask.unsqueeze(1).unsqueeze(0) attn = attn.reshape((-1, self.num_heads, N, N)) attn = self.softmax(attn) else: attn = self.softmax(attn) attn = self.attn_drop(attn) x = (attn.matmul(v)).transpose((0, 2, 1, 3)).reshape((B_, N, C)) x = self.proj(x) x = self.proj_drop(x) return xclass SwinTransformerBlock(nn.Layer): r""" Swin Transformer Block. Args: dim (int): Number of input channels. input_resolution (tuple[int]): Input resulotion. num_heads (int): Number of attention heads. window_size (int): Window size. shift_size (int): Shift size for SW-MSA. mlp_ratio (float): Ratio of mlp hidden dim to embedding dim. qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set. drop (float, optional): Dropout rate. Default: 0.0 attn_drop (float, optional): Attention dropout rate. Default: 0.0 drop_path (float, optional): Stochastic depth rate. Default: 0.0 act_layer (nn.Layer, optional): Activation layer. Default: nn.GELU norm_layer (nn.Layer, optional): Normalization layer. Default: nn.LayerNorm """ def __init__(self, dim, input_resolution, num_heads, window_size=7, shift_size=0, mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm): super().__init__() self.dim = dim self.input_resolution = input_resolution self.num_heads = num_heads self.window_size = window_size self.shift_size = shift_size self.mlp_ratio = mlp_ratio if min(self.input_resolution) <= self.window_size: # if window size is larger than input resolution, we don't partition windows self.shift_size = 0 self.window_size = min(self.input_resolution) assert 0 <= self.shift_size 0. else Identity() self.norm2 = norm_layer(dim) mlp_hidden_dim = int(dim * mlp_ratio) self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop) if self.shift_size > 0: # calculate attention mask for SW-MSA H, W = self.input_resolution img_mask = paddle.zeros((1, H, W, 1)) # 1 H W 1 h_slices = (slice(0, -self.window_size), slice(-self.window_size, -self.shift_size), slice(-self.shift_size, None)) w_slices = (slice(0, -self.window_size), slice(-self.window_size, -self.shift_size), slice(-self.shift_size, None)) cnt = 0 for h in h_slices: for w in w_slices: img_mask[:, h, w, :] = cnt cnt += 1 # nW, window_size, window_size, 1 mask_windows = window_partition(img_mask, self.window_size) mask_windows = mask_windows.reshape((-1, self.window_size * self.window_size)) attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2) _h = paddle.full_like(attn_mask, -100.0, dtype='float32') _z = paddle.full_like(attn_mask, 0.0, dtype='float32') attn_mask = paddle.where(attn_mask != 0, _h, _z) else: attn_mask = None self.register_buffer("attn_mask", attn_mask) def forward(self, x): H, W = self.input_resolution B, L, C = x.shape assert L == H * W, "input feature has wrong size" shortcut = x x = self.norm1(x) x = x.reshape((B, H, W, C)) # cyclic shift if self.shift_size > 0: shifted_x = paddle.roll( x, shifts=(-self.shift_size, -self.shift_size), axis=(1, 2)) else: shifted_x = x # partition windows # nW*B, window_size, window_size, C x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size*window_size, C x_windows = x_windows.reshape( (-1, self.window_size * self.window_size, C)) # W-MSA/SW-MSA # nW*B, window_size*window_size, C attn_windows = self.attn(x_windows, mask=self.attn_mask) # merge windows attn_windows = attn_windows.reshape( (-1, self.window_size, self.window_size, C)) shifted_x = window_reverse( attn_windows, self.window_size, H, W) # B H' W' C # reverse cyclic shift if self.shift_size > 0: x = paddle.roll(shifted_x, shifts=( self.shift_size, self.shift_size), axis=(1, 2)) else: x = shifted_x x = x.reshape((B, H * W, C)) # FFN x = shortcut + self.drop_path(x) x = x + self.drop_path(self.mlp(self.norm2(x))) return xclass PatchMerging(nn.Layer): r""" Patch Merging Layer. Args: input_resolution (tuple[int]): Resolution of input feature. dim (int): Number of input channels. norm_layer (nn.Layer, optional): Normalization layer. Default: nn.LayerNorm """ def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm): super().__init__() self.input_resolution = input_resolution self.dim = dim self.reduction = nn.Linear(4 * dim, 2 * dim, bias_attr=False) self.norm = norm_layer(4 * dim) def forward(self, x): """ x: B, H*W, C """ H, W = self.input_resolution B, L, C = x.shape assert L == H * W, "input feature has wrong size" assert H % 2 == 0 and W % 2 == 0, f"x size ({H}*{W}) are not even." x = x.reshape((B, H, W, C)) x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 C x1 = x[:, 1::2, 0::2, :] # B H/2 W/2 C x2 = x[:, 0::2, 1::2, :] # B H/2 W/2 C x3 = x[:, 1::2, 1::2, :] # B H/2 W/2 C x = paddle.concat([x0, x1, x2, x3], -1) # B H/2 W/2 4*C x = x.reshape((B, -1, 4 * C)) # B H/2*W/2 4*C x = self.norm(x) x = self.reduction(x) return xclass BasicLayer(nn.Layer): """ A basic Swin Transformer layer for one stage. Args: dim (int): Number of input channels. input_resolution (tuple[int]): Input resolution. depth (int): Number of blocks. num_heads (int): Number of attention heads. window_size (int): Local window size. mlp_ratio (float): Ratio of mlp hidden dim to embedding dim. qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set. drop (float, optional): Dropout rate. Default: 0.0 attn_drop (float, optional): Attention dropout rate. Default: 0.0 drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0 norm_layer (nn.Layer, optional): Normalization layer. Default: nn.LayerNorm downsample (nn.Layer | None, optional): Downsample layer at the end of the layer. Default: None """ def __init__(self, dim, input_resolution, depth, num_heads, window_size, mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0., norm_layer=nn.LayerNorm, downsample=None): super().__init__() self.dim = dim self.input_resolution = input_resolution self.depth = depth # build blocks self.blocks = nn.LayerList([ SwinTransformerBlock(dim=dim, input_resolution=input_resolution, num_heads=num_heads, window_size=window_size, shift_size=0 if ( i % 2 == 0) else window_size // 2, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale, drop=drop, attn_drop=attn_drop, drop_path=drop_path[i] if isinstance( drop_path, np.ndarray) else drop_path, norm_layer=norm_layer) for i in range(depth)]) # patch merging layer if downsample is not None: self.downsample = downsample( input_resolution, dim=dim, norm_layer=norm_layer) else: self.downsample = None def forward(self, x): for blk in self.blocks: x = blk(x) if self.downsample is not None: x = self.downsample(x) return xclass PatchEmbed(nn.Layer): r""" Image to Patch Embedding Args: img_size (int): Image size. Default: 224. patch_size (int): Patch token size. Default: 4. in_chans (int): Number of input image channels. Default: 3. embed_dim (int): Number of linear projection output channels. Default: 96. norm_layer (nn.Layer, optional): Normalization layer. Default: None """ def __init__(self, img_size=224, patch_size=4, in_chans=3, embed_dim=96, norm_layer=None): super().__init__() img_size = to_2tuple(img_size) patch_size = to_2tuple(patch_size) patches_resolution = [img_size[0] // patch_size[0], img_size[1] // patch_size[1]] self.img_size = img_size self.patch_size = patch_size self.patches_resolution = patches_resolution self.num_patches = patches_resolution[0] * patches_resolution[1] self.in_chans = in_chans self.embed_dim = embed_dim self.proj = nn.Conv2D(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size) if norm_layer is not None: self.norm = norm_layer(embed_dim) else: self.norm = None def forward(self, x): B, C, H, W = x.shape # FIXME look at relaxing size constraints assert H == self.img_size[0] and W == self.img_size[1], f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})." x = self.proj(x).flatten(2).transpose((0, 2, 1)) # B Ph*Pw C if self.norm is not None: x = self.norm(x) return xclass SwinTransformer(nn.Layer): r""" Swin Transformer A Paddle impl of : `Swin Transformer: Hierarchical Vision Transformer using Shifted Windows` - https://arxiv.org/pdf/2103.14030 Args: img_size (int | tuple(int)): Input image size. Default 224 patch_size (int | tuple(int)): Patch size. Default: 4 in_chans (int): Number of input image channels. Default: 3 class_dim (int): Number of classes for classification head. Default: 1000 embed_dim (int): Patch embedding dimension. Default: 96 depths (tuple(int)): Depth of each Swin Transformer layer. num_heads (tuple(int)): Number of attention heads in different layers. window_size (int): Window size. Default: 7 mlp_ratio (float): Ratio of mlp hidden dim to embedding dim. Default: 4 qkv_bias (bool): If True, add a learnable bias to query, key, value. Default: True qk_scale (float): Override default qk scale of head_dim ** -0.5 if set. Default: None drop_rate (float): Dropout rate. Default: 0 attn_drop_rate (float): Attention dropout rate. Default: 0 drop_path_rate (float): Stochastic depth rate. Default: 0.1 norm_layer (nn.Layer): Normalization layer. Default: nn.LayerNorm. ape (bool): If True, add absolute position embedding to the patch embedding. Default: False patch_norm (bool): If True, add normalization after patch embedding. Default: True """ def __init__(self, img_size=224, patch_size=4, in_chans=3, embed_dim=96, depths=[2, 2, 6, 2], num_heads=[3, 6, 12, 24], window_size=7, mlp_ratio=4., qkv_bias=True, qk_scale=None, drop_rate=0., attn_drop_rate=0., drop_path_rate=0.1, norm_layer=nn.LayerNorm, ape=False, patch_norm=True, class_dim=1000, with_pool=True, **kwargs): super().__init__() self.class_dim = class_dim self.with_pool = with_pool self.num_layers = len(depths) self.embed_dim = embed_dim self.ape = ape self.patch_norm = patch_norm self.num_features = int(embed_dim * 2 ** (self.num_layers - 1)) self.mlp_ratio = mlp_ratio # split image into non-overlapping patches self.patch_embed = PatchEmbed( img_size=img_size, patch_size=patch_size, in_chans=in_chans, embed_dim=embed_dim, norm_layer=norm_layer if self.patch_norm else None) num_patches = self.patch_embed.num_patches patches_resolution = self.patch_embed.patches_resolution self.patches_resolution = patches_resolution # absolute position embedding if self.ape: self.absolute_pos_embed = self.create_parameter( shape=(1, num_patches, embed_dim), default_initializer=zeros_ ) self.add_parameter("absolute_pos_embed", self.absolute_pos_embed) trunc_normal_(self.absolute_pos_embed) self.pos_drop = nn.Dropout(p=drop_rate) # stochastic depth dpr = np.linspace(0, drop_path_rate, sum(depths)) # build layers self.layers = nn.LayerList() for i_layer in range(self.num_layers): layer = BasicLayer(dim=int(embed_dim * 2 ** i_layer), input_resolution=(patches_resolution[0] // (2 ** i_layer), patches_resolution[1] // (2 ** i_layer)), depth=depths[i_layer], num_heads=num_heads[i_layer], window_size=window_size, mlp_ratio=self.mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale, drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr[sum(depths[:i_layer]):sum( depths[:i_layer + 1])], norm_layer=norm_layer, downsample=PatchMerging if ( i_layer 0: self.head = nn.Linear(self.num_features, class_dim) self.apply(self._init_weights) def _init_weights(self, m): if isinstance(m, nn.Linear): trunc_normal_(m.weight) if isinstance(m, nn.Linear) and m.bias is not None: zeros_(m.bias) elif isinstance(m, nn.LayerNorm): zeros_(m.bias) ones_(m.weight) def forward_features(self, x): x = self.patch_embed(x) if self.ape: x = x + self.absolute_pos_embed x = self.pos_drop(x) for layer in self.layers: x = layer(x) x = self.norm(x) # B L C return x.transpose((0, 2, 1)) # B C 1 def forward(self, x): x = self.forward_features(x) if self.with_pool: x = self.avgpool(x) if self.class_dim > 0: x = paddle.flatten(x, 1) x = self.head(x) return x
验证集数据处理
In [3]
def get_transforms(resize, crop): transforms = [T.Resize(resize, interpolation='bicubic')] if crop: transforms.append(T.CenterCrop(crop)) transforms.append(T.ToTensor()) transforms.append(T.Normalize( mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])) transforms = T.Compose(transforms) return transformstransforms_224 = get_transforms(256, 224)transforms_384 = get_transforms((384, 384), None)
预设模型
In [4]
def swin_ti(pretrained=False, **kwargs): model = SwinTransformer(**kwargs) if pretrained: model.set_dict(paddle.load('data/data80934/swin_tiny_patch4_window7_224.pdparams')) return model, transforms_224def swin_s(pretrained=False, **kwargs): model = SwinTransformer( depths=[2, 2, 18, 2], num_heads=[3, 6, 12, 24] ** kwargs ) if pretrained: model.set_dict(paddle.load('data/data80934/swin_small_patch4_window7_224.pdparams')) return model, transforms_224def swin_b(pretrained=False, **kwargs): model = SwinTransformer( embed_dim=128, depths=[2, 2, 18, 2], num_heads=[4, 8, 16, 32] ** kwargs ) if pretrained: model.set_dict(paddle.load('data/data80934/swin_base_patch4_window7_224.pdparams')) return model, transforms_224def swin_b_384(pretrained=False, **kwargs): model = SwinTransformer( img_size=384, embed_dim=128, depths=[2, 2, 18, 2], num_heads=[4, 8, 16, 32], window_size=12, **kwargs ) if pretrained: model.set_dict(paddle.load('data/data80934/swin_base_patch4_window12_384.pdparams')) return model, transforms_384
精度验证
解压数据集
In [ ]
# 解压数据集!mkdir ~/data/ILSVRC2012!tar -xf ~/data/data68594/ILSVRC2012_img_val.tar -C ~/data/ILSVRC2012
模型验证
In [5]
import osimport cv2import numpy as npimport paddle# from ppim import pit_b_distilledfrom PIL import Image# 构建数据集class ILSVRC2012(paddle.io.Dataset): def __init__(self, root, label_list, transform, backend='pil'): self.transform = transform self.root = root self.label_list = label_list self.backend = backend self.load_datas() def load_datas(self): self.imgs = [] self.labels = [] with open(self.label_list, 'r') as f: for line in f: img, label = line[:-1].split(' ') self.imgs.append(os.path.join(self.root, img)) self.labels.append(int(label)) def __getitem__(self, idx): label = self.labels[idx] image = self.imgs[idx] if self.backend=='cv2': image = cv2.imread(image) else: image = Image.open(image).convert('RGB') image = self.transform(image) return image.astype('float32'), np.array(label).astype('int64') def __len__(self): return len(self.imgs)# 配置模型model, val_transforms = swin_ti(pretrained=True)model = paddle.Model(model)model.prepare(metrics=paddle.metric.Accuracy(topk=(1, 5)))# 配置数据集val_dataset = ILSVRC2012('data/ILSVRC2012', transform=val_transforms, label_list='data/data68594/val_list.txt')# 模型验证model.evaluate(val_dataset, batch_size=512)
Eval begin...The loss value printed in the log is the current batch, and the metric is the average value of previous step.
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/paddle/fluid/layers/utils.py:77: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working return (isinstance(seq, collections.Sequence) and
step 10/98 - acc_top1: 0.8164 - acc_top5: 0.9547 - 7s/stepstep 20/98 - acc_top1: 0.8155 - acc_top5: 0.9549 - 7s/stepstep 30/98 - acc_top1: 0.8113 - acc_top5: 0.9542 - 7s/stepstep 40/98 - acc_top1: 0.8113 - acc_top5: 0.9543 - 7s/stepstep 50/98 - acc_top1: 0.8115 - acc_top5: 0.9547 - 7s/stepstep 60/98 - acc_top1: 0.8115 - acc_top5: 0.9547 - 7s/stepstep 70/98 - acc_top1: 0.8107 - acc_top5: 0.9550 - 7s/stepstep 80/98 - acc_top1: 0.8116 - acc_top5: 0.9549 - 7s/stepstep 90/98 - acc_top1: 0.8113 - acc_top5: 0.9549 - 6s/stepstep 98/98 - acc_top1: 0.8119 - acc_top5: 0.9551 - 6s/stepEval samples: 50000
{'acc_top1': 0.81186, 'acc_top5': 0.9551}
以上就是Swin Transformer:层次化视觉 Transformer的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/59466.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫