电子科技大学自动化工程学院本科生竟婉君同学取得重大科研成果!其参与撰写的论文《基于自适应神经网络双滑模的非线性多电机系统固定时间控制》已被中科院一区top期刊information sciences(影响因子8.1)录用,并已在线发表。竟婉君同学担任论文第一作者,李猛副研究员担任通讯作者。目前,竟婉君同学已获得中国科学院大学自动化研究所的推免资格。
该研究针对非线性伺服多电机系统在齿隙/摩擦非线性及未知时变时滞影响下的负载跟踪与同步控制难题,提出了一种创新的自适应神经网络固定时间控制策略。研究首先建立了考虑未知齿隙、摩擦和时变时滞约束的非严格反馈非线性系统模型;然后,巧妙地运用多面滑模概念解决多电机系统的负载跟踪和速度同步问题,并利用自适应神经网络对摩擦进行有效补偿。该滑模控制器可确保系统在固定时间内收敛,且收敛时间上限可预先设定,不受初始状态影响。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
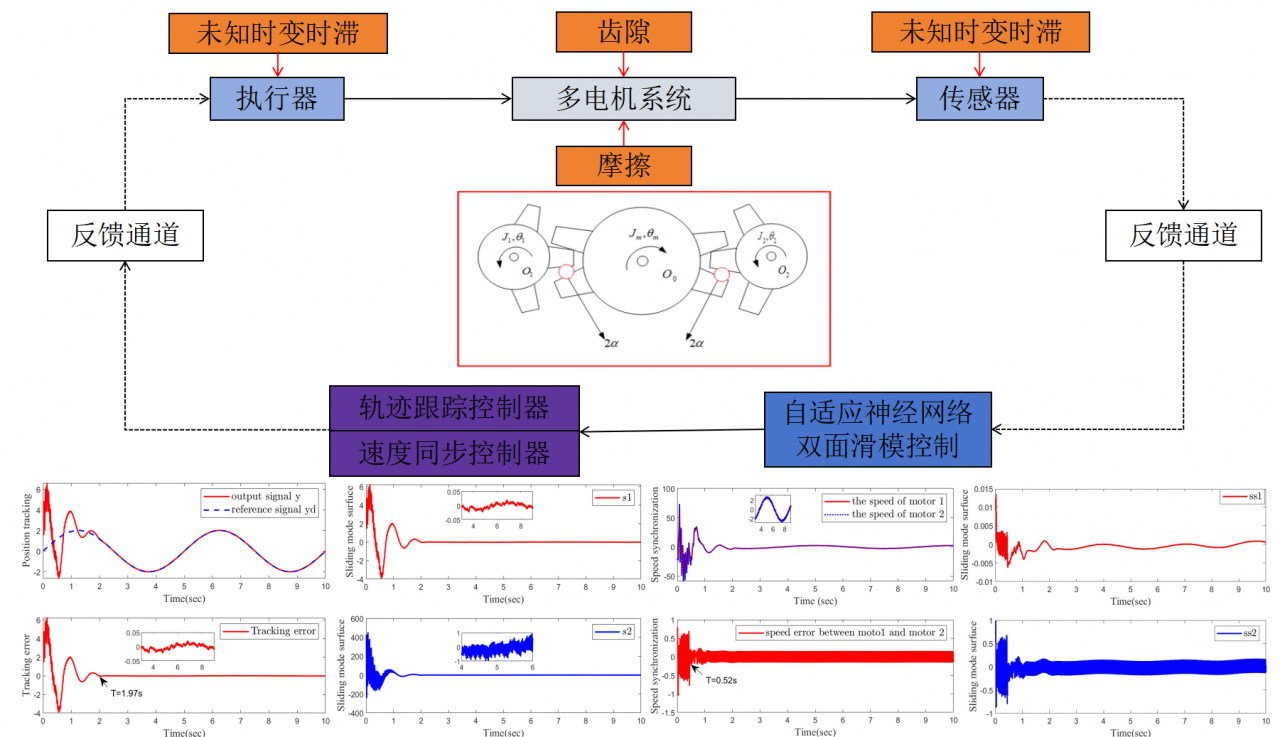
图1 控制方案结构框图及实验结果
 AI大学堂
AI大学堂
科大讯飞打造的AI学习平台
 87 查看详情
87 查看详情 
这项研究成果依托于电子科技大学电力电子与先进控制中心团队。该团队由陈勇教授领衔,成立于2011年,2016年联合5个学院的10名青年教师成立了电子科技大学电动汽车动力系统与安全技术研究所,构建了跨学院、跨学科的科研平台,并入选首批电子科技大学创新领域科技平台培育计划。团队坚持“基础研究与应用研究并重”的理念,以“先进检测技术、故障诊断与容错和先进控制”为理论基础,“电机控制、电力电子控制”为技术应用方向,并以“新能源汽车和智能交通”为应用平台,承担了一系列国家重点专项、国家自然科学基金项目、省部级项目以及企业横向项目。研究成果已在IEEE Trans系列期刊和顶级国际会议上发表论文200余篇,并拥有150多项发明专利。
以上就是电子科技大学自动化工程学院本科生在TOP期刊INS上发表研究成果的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/597547.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫