
本文介绍基于Transformer的图像分类器CoaT,其含Co-Scale和Conv-Attentional机制,能为Vision Transformer提供多尺度和上下文建模功能,性能超T2T-ViT等网络。还阐述了Conv-Attention模块、Co-Scale机制的原理与代码实现,搭建了模型并验证了精度。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
引入
在本文中介绍了 Co-scale conv-attentional image Transformers(CoaT)这是一种基于 Transformer 的图像分类器,其主要包含 Co-Scale 和 Conv-Attentional 机制设计CoaT 为 Vision Transformer 提供了丰富的多尺度和上下文建模功能,表现SOTA,性能优于 T2T-ViT、DeiT、PVT 等网络
相关资料
论文:Co-Scale Conv-Attentional Image Transformers官方实现:mlpc-ucsd/CoaT
主要改进
设计了一个 Conv-Attention 模块,利用类似卷积的注意力操作,在 Factorized Attention 模块中实现相对位置嵌入。引入了一种 Co-Scale 机制,开发了串行块和并行块 2 种 Co-Scale 块,实现了从细到粗、从粗到细和跨尺度的注意力图像建模。
Conv-Attention 模块
原理介绍
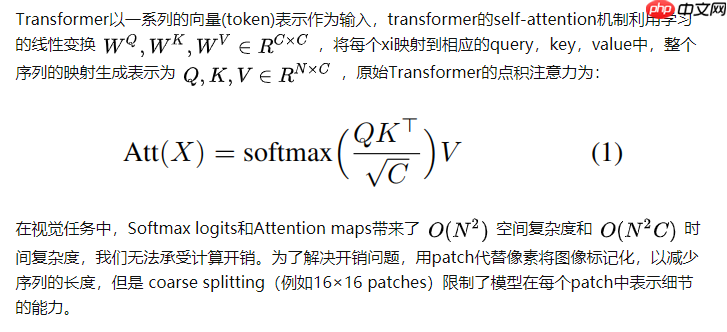
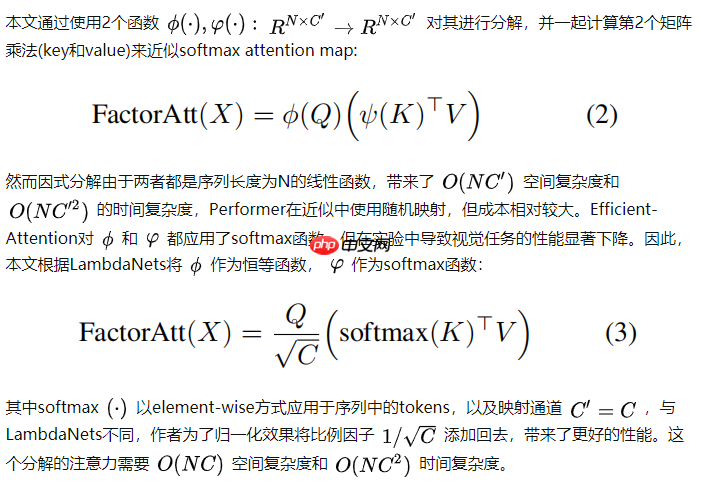
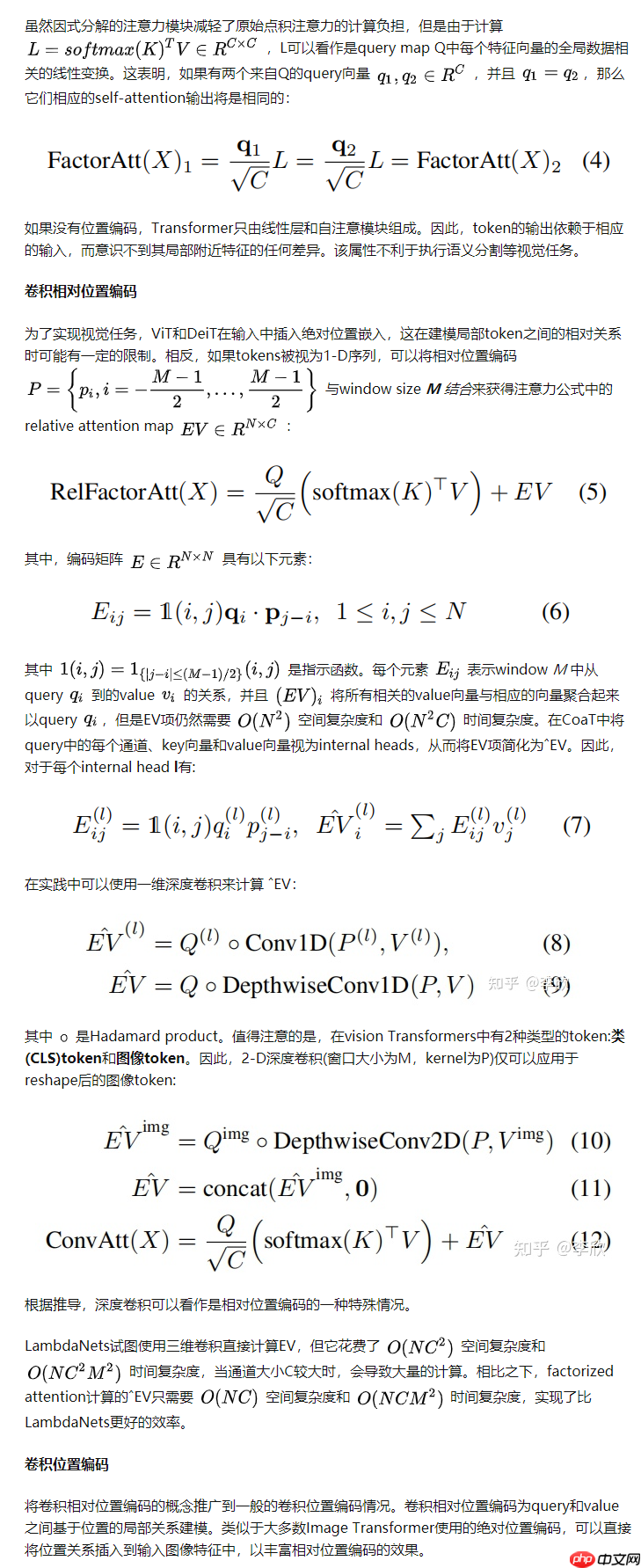
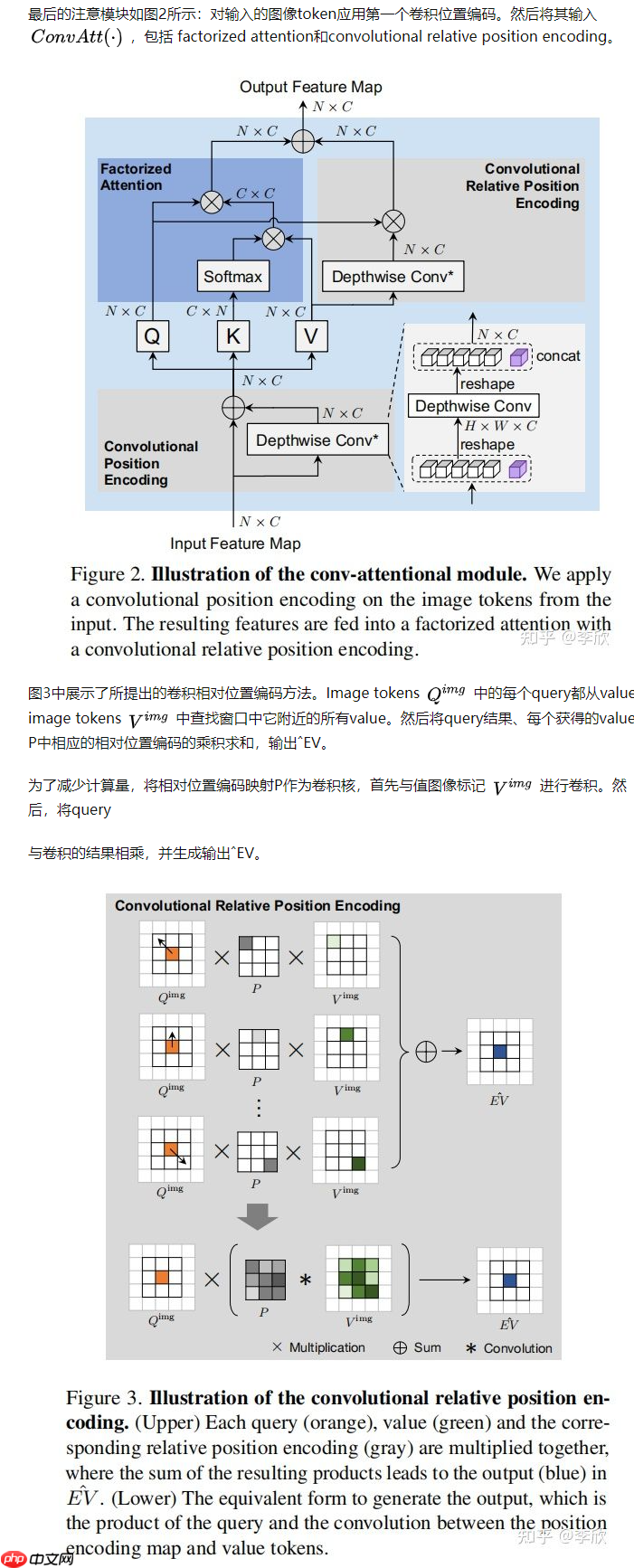
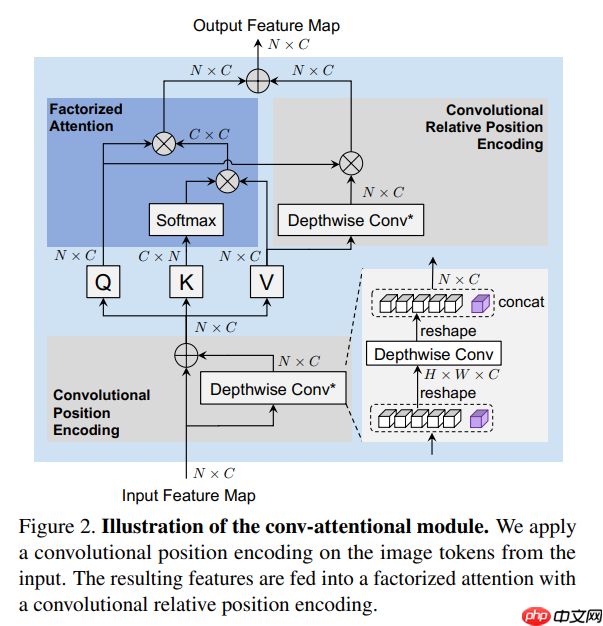
其实注意力模型也很早就已经被引入视觉领域。LocalNet、Standalone Self-Attention 等用 Self-Attention 模块代替类 resnet 架构中的卷积,更好地实现 Local 和 Non-Local 关系建模。而 ViT 和 DeiT 则直接采用 Transformer 进行图像识别。最近有研究通过引入卷积来增强注意力机制。LambdaNets 引入了一种有效的 Self-Attention 替代方法用于全局上下文建模,并在局部上下文建模中采用3D卷积实现相对位置嵌入。CPVT 将 2D 深度卷积设计为 Self-Attention 后的条件位置编码。在 Conv-Attention 中:采用 Lambdanetworks 之后的高效因式注意力;设计了一种深度基于卷积的相对位置编码;将其扩展为卷积位置编码的一种替代情况。
Factorized Attention 机制
Convolution as Position Encoding
Conv-Attentional Mechanism
代码实现
class ConvRelPosEnc(nn.Layer): """ Convolutional relative position encoding. """ def __init__(self, Ch, h, window): """ Initialization. Ch: Channels per head. h: Number of heads. window: Window size(s) in convolutional relative positional encoding. It can have two forms: 1. An integer of window size, which assigns all attention heads with the same window size in ConvRelPosEnc. 2. A dict mapping window size to #attention head splits (e.g. {window size 1: #attention head split 1, window size 2: #attention head split 2}) It will apply different window size to the attention head splits. """ super().__init__() if isinstance(window, int): # Set the same window size for all attention heads. window = {window: h} self.window = window elif isinstance(window, dict): self.window = window else: raise ValueError() self.conv_list = nn.LayerList() self.head_splits = [] for cur_window, cur_head_split in window.items(): # Use dilation=1 at default. dilation = 1 padding_size = (cur_window + (cur_window - 1) * (dilation - 1)) // 2 cur_conv = nn.Conv2D(cur_head_split*Ch, cur_head_split*Ch, kernel_size=(cur_window, cur_window), padding=(padding_size, padding_size), dilation=(dilation, dilation), groups=cur_head_split*Ch, ) self.conv_list.append(cur_conv) self.head_splits.append(cur_head_split) self.channel_splits = [x*Ch for x in self.head_splits] def forward(self, q, v, size): B, h, N, Ch = q.shape H, W = size assert N == 1 + H * W # Convolutional relative position encoding. # Shape: [B, h, H*W, Ch]. q_img = q[:, :, 1:, :] # Shape: [B, h, H*W, Ch]. v_img = v[:, :, 1:, :] # Shape: [B, h, H*W, Ch] -> [B, h*Ch, H, W]. v_img = v_img.reshape((B, h, H, W, Ch)) v_img = v_img.transpose((0, 1, 4, 2, 3)) v_img = v_img.flatten(1, 2) # v_img = rearrange(v_img, 'B h (H W) Ch -> B (h Ch) H W', H=H, W=W) # Split according to channels. v_img_list = paddle.split(v_img, self.channel_splits, axis=1) conv_v_img_list = [conv(x) for conv, x in zip(self.conv_list, v_img_list)] conv_v_img = paddle.concat(conv_v_img_list, axis=1) # Shape: [B, h*Ch, H, W] -> [B, h, H*W, Ch]. conv_v_img = conv_v_img.reshape((B, h, Ch, H, W)) conv_v_img = conv_v_img.transpose((0, 1, 3, 4, 2)) conv_v_img = conv_v_img.flatten(2, 3) # conv_v_img = rearrange(conv_v_img, 'B (h Ch) H W -> B h (H W) Ch', h=h) EV_hat_img = q_img * conv_v_img zero = paddle.zeros((B, h, 1, Ch), dtype=q.dtype) # Shape: [B, h, N, Ch]. EV_hat = paddle.concat((zero, EV_hat_img), axis=2) return EV_hatclass FactorAtt_ConvRelPosEnc(nn.Layer): """ Factorized attention with convolutional relative position encoding class. """ def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0., shared_crpe=None): super().__init__() self.num_heads = num_heads head_dim = dim // num_heads self.scale = qk_scale or head_dim ** -0.5 self.qkv = nn.Linear(dim, dim * 3, bias_attr=qkv_bias) # Note: attn_drop is actually not used. self.attn_drop = nn.Dropout(attn_drop) self.proj = nn.Linear(dim, dim) self.proj_drop = nn.Dropout(proj_drop) # Shared convolutional relative position encoding. self.crpe = shared_crpe def forward(self, x, size): B, N, C = x.shape # Generate Q, K, V. # Shape: [3, B, h, N, Ch]. qkv = self.qkv(x).reshape( (B, N, 3, self.num_heads, C // self.num_heads) ).transpose((2, 0, 3, 1, 4)) # Shape: [B, h, N, Ch]. q, k, v = qkv[0], qkv[1], qkv[2] # Factorized attention. # Softmax on dim N. k_softmax = nn.functional.softmax(k, axis=2) # Shape: [B, h, Ch, Ch]. k_softmax_T_dot_v = paddle.matmul(k_softmax.transpose((0, 1, 3, 2)), v) # k_softmax_T_dot_v = einsum('b h n k, b h n v -> b h k v', k_softmax, v) # Shape: [B, h, N, Ch]. # factor_att = einsum('b h n k, b h k v -> b h n v', q, k_softmax_T_dot_v) factor_att = paddle.matmul(q, k_softmax_T_dot_v) # Convolutional relative position encoding. # Shape: [B, h, N, Ch]. crpe = self.crpe(q, v, size=size) # Merge and reshape. x = self.scale * factor_att + crpe # Shape: [B, h, N, Ch] -> [B, N, h, Ch] -> [B, N, C]. x = x.transpose((0, 2, 1, 3)).reshape((B, N, C)) # Output projection. x = self.proj(x) x = self.proj_drop(x) # Shape: [B, N, C]. return xclass ConvPosEnc(nn.Layer): """ Convolutional Position Encoding. Note: This module is similar to the conditional position encoding in CPVT. """ def __init__(self, dim, k=3): super(ConvPosEnc, self).__init__() self.proj = nn.Conv2D(dim, dim, k, 1, k//2, groups=dim) def forward(self, x, size): B, N, C = x.shape H, W = size assert N == 1 + H * W # Extract CLS token and image tokens. # Shape: [B, 1, C], [B, H*W, C]. cls_token, img_tokens = x[:, :1], x[:, 1:] # Depthwise convolution. feat = img_tokens.transpose((0, 2, 1)).reshape((B, C, H, W)) x = self.proj(feat) + feat x = x.flatten(2).transpose((0, 2, 1)) # Combine with CLS token. x = paddle.concat((cls_token, x), axis=1) return x
Co-Scale 机制
原理介绍
其实多尺度方法在CV领域有着悠久的历史。比如U-Net除了标准的细到粗路径之外,还强制执行额外的粗到细路径;HRNet通过在整个卷积层中同时保持细尺度和粗尺度,进一步增强了模型表征能力。在 Pyramid ViT 就是一个类似的工作,将不同尺度层做相互融合,但 Pyramid ViT 只是执行一种从细到粗的策略。这里提出的 Co-Scale 机制不同于现有的方法:CoaT 由一系列高度模块化的串行和并行块组成,可以对标记化表示进行从细到粗、从粗到细以及跨尺度的关注。在 Co-Scale 模块中,跨不同尺度的联合注意力机制提供了比现有多尺度方法中的标准线性融合更强的建模能力。在本文中作者提出了以下两种 Co-Scale 块。
CoaT Serial Block
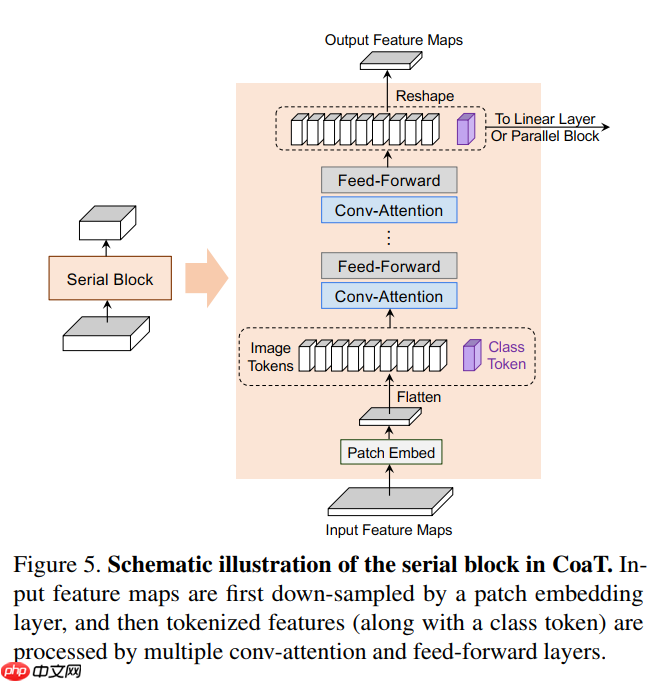
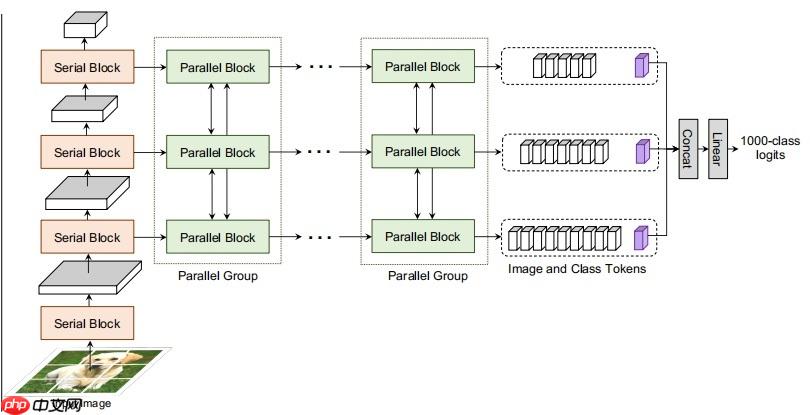
在一个典型的 serial block 中:首先,使用一个 patch 嵌入层 (2D 卷积层) 按一定比例对输入特征映射进行下采样,并将缩减后的特征映射 flatten 为一系列图像 token。然后,将图像 token 与附加的 CLS token 连接起来,并应用到多个常规注意力模块来学习图像 token 和 CLS token 之间的内部关系。最后,将 CLS token 从图像 token 中分离出来,并将图像 token reshape 为二维特征映射,用于下一个串行块。
CoaT Parallel Block
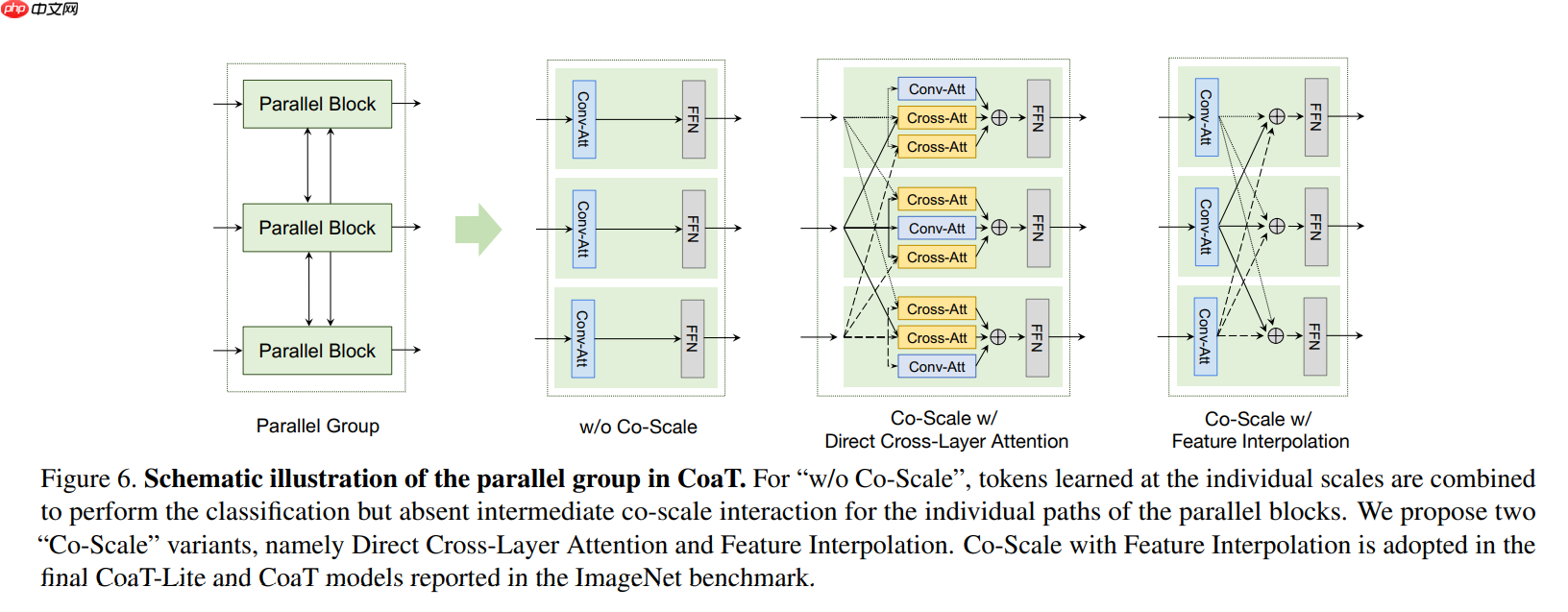
作者在每个并行组的并行块之间实现了跨尺度的注意。在一个典型的并行组中,我们有来自不同尺度的串行块的输入特征序列 (image token 和 CLS token)。为了实现并行组的从细到粗、从粗到细和跨尺度的注意力,我们提出了两种策略(1)直接跨层注意力(direct cross-layer attention)(2)特征插值注意力(attention with feature interpolation)在论文中,作者采用“特征插值注意力”来提高经验性能。在“直接跨层注意力”中,从每个尺度的输入特征中形成查询、键和值向量。对于同一层中的注意力,使用 Conv-Attention (下图2),并使用来自当前尺度(Scale)的 query、key 和 value 向量。对于不同层次的注意力,对 key 和 value 向量进行上下采样,以匹配其他尺度的分辨率。然后执行 Cross-Attention,它通过来自当前尺度的 query 向量和来自另一个尺度 key 和 value 向量来扩展 Conv-Attention。最后,我们将 Conv-Attention 和 Cross-Attention 的输出求和,并应用共享的前馈层(FFN)。通过“直接跨层注意力”,跨层信息以 Cross-Attention 的方式融合。
代码实现
class SerialBlock(nn.Layer): """ Serial block class. Note: In this implementation, each serial block only contains a conv-attention and a FFN (MLP) module. """ def __init__(self, dim, num_heads, mlp_ratio=4., qkv_bias=False, qk_scale=None, drop=0., attn_drop=0., drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm, epsilon=1e-6, shared_cpe=None, shared_crpe=None): super().__init__() # Conv-Attention. self.cpe = shared_cpe self.norm1 = norm_layer(dim, epsilon=epsilon) self.factoratt_crpe = FactorAtt_ConvRelPosEnc( dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop, shared_crpe=shared_crpe ) self.drop_path = DropPath(drop_path) if drop_path > 0. else Identity() # MLP. self.norm2 = norm_layer(dim, epsilon=epsilon) mlp_hidden_dim = int(dim * mlp_ratio) self.mlp = Mlp( in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop ) def forward(self, x, size): # Conv-Attention. # Apply convolutional position encoding. x = self.cpe(x, size) cur = self.norm1(x) # Apply factorized attention and convolutional relative position encoding. cur = self.factoratt_crpe(cur, size) x = x + self.drop_path(cur) # MLP. cur = self.norm2(x) cur = self.mlp(cur) x = x + self.drop_path(cur) return xclass ParallelBlock(nn.Layer): """ Parallel block class. """ def __init__(self, dims, num_heads, mlp_ratios=[], qkv_bias=False, qk_scale=None, drop=0., attn_drop=0., drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm, epsilon=1e-6, shared_cpes=None, shared_crpes=None): super().__init__() # Conv-Attention. self.cpes = shared_cpes self.norm12 = norm_layer(dims[1], epsilon=epsilon) self.norm13 = norm_layer(dims[2], epsilon=epsilon) self.norm14 = norm_layer(dims[3], epsilon=epsilon) self.factoratt_crpe2 = FactorAtt_ConvRelPosEnc( dims[1], num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop, shared_crpe=shared_crpes[1] ) self.factoratt_crpe3 = FactorAtt_ConvRelPosEnc( dims[2], num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop, shared_crpe=shared_crpes[2] ) self.factoratt_crpe4 = FactorAtt_ConvRelPosEnc( dims[3], num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop, shared_crpe=shared_crpes[3] ) self.drop_path = DropPath(drop_path) if drop_path > 0. else Identity() # MLP. self.norm22 = norm_layer(dims[1], epsilon=epsilon) self.norm23 = norm_layer(dims[2], epsilon=epsilon) self.norm24 = norm_layer(dims[3], epsilon=epsilon) # In parallel block, we assume dimensions are the same and share the linear transformation. assert dims[1] == dims[2] == dims[3] assert mlp_ratios[1] == mlp_ratios[2] == mlp_ratios[3] mlp_hidden_dim = int(dims[1] * mlp_ratios[1]) self.mlp2 = self.mlp3 = self.mlp4 = Mlp( in_features=dims[1], hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop ) def upsample(self, x, factor, size): """ Feature map up-sampling. """ return self.interpolate(x, scale_factor=factor, size=size) def downsample(self, x, factor, size): """ Feature map down-sampling. """ return self.interpolate(x, scale_factor=1.0/factor, size=size) def interpolate(self, x, scale_factor, size): """ Feature map interpolation. """ B, N, C = x.shape H, W = size assert N == 1 + H * W cls_token = x[:, :1, :] img_tokens = x[:, 1:, :] img_tokens = img_tokens.transpose((0, 2, 1)).reshape((B, C, H, W)) img_tokens = F.interpolate( img_tokens, scale_factor=scale_factor, mode='bilinear' ) img_tokens = img_tokens.reshape((B, C, -1)).transpose((0, 2, 1)) out = paddle.concat((cls_token, img_tokens), axis=1) return out def forward(self, x1, x2, x3, x4, sizes): _, (H2, W2), (H3, W3), (H4, W4) = sizes # Conv-Attention. x2 = self.cpes[1](x2, size=(H2, W2)) # Note: x1 is ignored. x3 = self.cpes[2](x3, size=(H3, W3)) x4 = self.cpes[3](x4, size=(H4, W4)) cur2 = self.norm12(x2) cur3 = self.norm13(x3) cur4 = self.norm14(x4) cur2 = self.factoratt_crpe2(cur2, size=(H2, W2)) cur3 = self.factoratt_crpe3(cur3, size=(H3, W3)) cur4 = self.factoratt_crpe4(cur4, size=(H4, W4)) upsample3_2 = self.upsample(cur3, factor=2, size=(H3, W3)) upsample4_3 = self.upsample(cur4, factor=2, size=(H4, W4)) upsample4_2 = self.upsample(cur4, factor=4, size=(H4, W4)) downsample2_3 = self.downsample(cur2, factor=2, size=(H2, W2)) downsample3_4 = self.downsample(cur3, factor=2, size=(H3, W3)) downsample2_4 = self.downsample(cur2, factor=4, size=(H2, W2)) cur2 = cur2 + upsample3_2 + upsample4_2 cur3 = cur3 + upsample4_3 + downsample2_3 cur4 = cur4 + downsample3_4 + downsample2_4 x2 = x2 + self.drop_path(cur2) x3 = x3 + self.drop_path(cur3) x4 = x4 + self.drop_path(cur4) # MLP. cur2 = self.norm22(x2) cur3 = self.norm23(x3) cur4 = self.norm24(x4) cur2 = self.mlp2(cur2) cur3 = self.mlp3(cur3) cur4 = self.mlp4(cur4) x2 = x2 + self.drop_path(cur2) x3 = x3 + self.drop_path(cur3) x4 = x4 + self.drop_path(cur4) return x1, x2, x3, x4
模型架构
CoaT 的模型架构如下图所示:
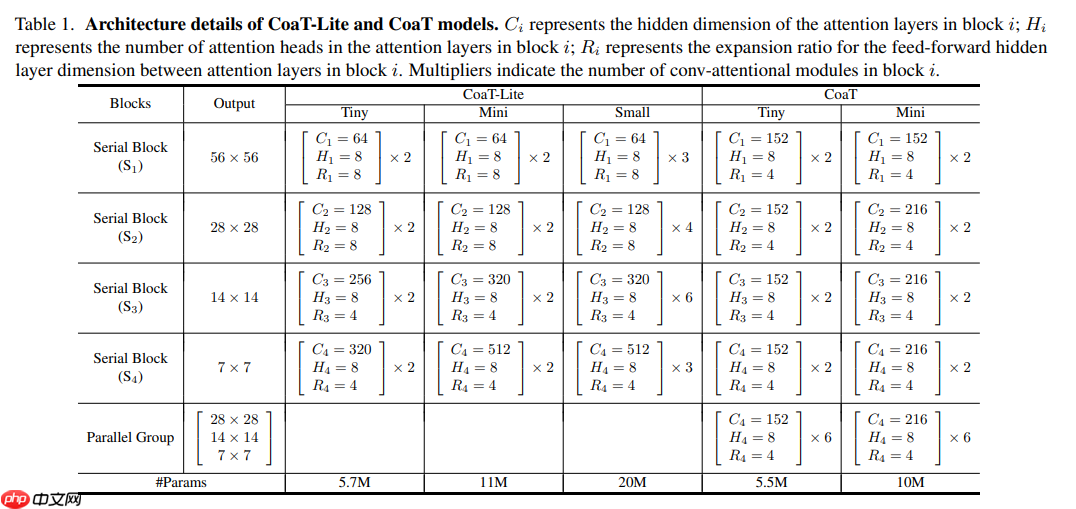
本文开发了三种不同模型尺寸的 CoaT 和 CoaT-Lite,分别为 Tiny, Mini 和 Small。
模型搭建
上面介绍了 CoaT 模型的一些重要的改进点接下来就完整地搭建一下模型
模型组网
In [1]
import paddleimport paddle.nn as nnimport paddle.nn.functional as Ffrom common import DropPath, Identityfrom common import to_2tuple, add_parameterfrom common import trunc_normal_, ones_, zeros_class Mlp(nn.Layer): """ Feed-forward network (FFN, a.k.a. MLP) class. """ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.): super().__init__() out_features = out_features or in_features hidden_features = hidden_features or in_features self.fc1 = nn.Linear(in_features, hidden_features) self.act = act_layer() self.fc2 = nn.Linear(hidden_features, out_features) self.drop = nn.Dropout(drop) def forward(self, x): x = self.fc1(x) x = self.act(x) x = self.drop(x) x = self.fc2(x) x = self.drop(x) return xclass ConvRelPosEnc(nn.Layer): """ Convolutional relative position encoding. """ def __init__(self, Ch, h, window): """ Initialization. Ch: Channels per head. h: Number of heads. window: Window size(s) in convolutional relative positional encoding. It can have two forms: 1. An integer of window size, which assigns all attention heads with the same window size in ConvRelPosEnc. 2. A dict mapping window size to #attention head splits (e.g. {window size 1: #attention head split 1, window size 2: #attention head split 2}) It will apply different window size to the attention head splits. """ super().__init__() if isinstance(window, int): # Set the same window size for all attention heads. window = {window: h} self.window = window elif isinstance(window, dict): self.window = window else: raise ValueError() self.conv_list = nn.LayerList() self.head_splits = [] for cur_window, cur_head_split in window.items(): # Use dilation=1 at default. dilation = 1 padding_size = (cur_window + (cur_window - 1) * (dilation - 1)) // 2 cur_conv = nn.Conv2D(cur_head_split*Ch, cur_head_split*Ch, kernel_size=(cur_window, cur_window), padding=(padding_size, padding_size), dilation=(dilation, dilation), groups=cur_head_split*Ch, ) self.conv_list.append(cur_conv) self.head_splits.append(cur_head_split) self.channel_splits = [x*Ch for x in self.head_splits] def forward(self, q, v, size): B, h, N, Ch = q.shape H, W = size assert N == 1 + H * W # Convolutional relative position encoding. # Shape: [B, h, H*W, Ch]. q_img = q[:, :, 1:, :] # Shape: [B, h, H*W, Ch]. v_img = v[:, :, 1:, :] # Shape: [B, h, H*W, Ch] -> [B, h*Ch, H, W]. v_img = v_img.reshape((B, h, H, W, Ch)) v_img = v_img.transpose((0, 1, 4, 2, 3)) v_img = v_img.flatten(1, 2) # v_img = rearrange(v_img, 'B h (H W) Ch -> B (h Ch) H W', H=H, W=W) # Split according to channels. v_img_list = paddle.split(v_img, self.channel_splits, axis=1) conv_v_img_list = [conv(x) for conv, x in zip(self.conv_list, v_img_list)] conv_v_img = paddle.concat(conv_v_img_list, axis=1) # Shape: [B, h*Ch, H, W] -> [B, h, H*W, Ch]. conv_v_img = conv_v_img.reshape((B, h, Ch, H, W)) conv_v_img = conv_v_img.transpose((0, 1, 3, 4, 2)) conv_v_img = conv_v_img.flatten(2, 3) # conv_v_img = rearrange(conv_v_img, 'B (h Ch) H W -> B h (H W) Ch', h=h) EV_hat_img = q_img * conv_v_img zero = paddle.zeros((B, h, 1, Ch), dtype=q.dtype) # Shape: [B, h, N, Ch]. EV_hat = paddle.concat((zero, EV_hat_img), axis=2) return EV_hatclass FactorAtt_ConvRelPosEnc(nn.Layer): """ Factorized attention with convolutional relative position encoding class. """ def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0., shared_crpe=None): super().__init__() self.num_heads = num_heads head_dim = dim // num_heads self.scale = qk_scale or head_dim ** -0.5 self.qkv = nn.Linear(dim, dim * 3, bias_attr=qkv_bias) # Note: attn_drop is actually not used. self.attn_drop = nn.Dropout(attn_drop) self.proj = nn.Linear(dim, dim) self.proj_drop = nn.Dropout(proj_drop) # Shared convolutional relative position encoding. self.crpe = shared_crpe def forward(self, x, size): B, N, C = x.shape # Generate Q, K, V. # Shape: [3, B, h, N, Ch]. qkv = self.qkv(x).reshape( (B, N, 3, self.num_heads, C // self.num_heads) ).transpose((2, 0, 3, 1, 4)) # Shape: [B, h, N, Ch]. q, k, v = qkv[0], qkv[1], qkv[2] # Factorized attention. # Softmax on dim N. k_softmax = nn.functional.softmax(k, axis=2) # Shape: [B, h, Ch, Ch]. k_softmax_T_dot_v = paddle.matmul(k_softmax.transpose((0, 1, 3, 2)), v) # k_softmax_T_dot_v = einsum('b h n k, b h n v -> b h k v', k_softmax, v) # Shape: [B, h, N, Ch]. # factor_att = einsum('b h n k, b h k v -> b h n v', q, k_softmax_T_dot_v) factor_att = paddle.matmul(q, k_softmax_T_dot_v) # Convolutional relative position encoding. # Shape: [B, h, N, Ch]. crpe = self.crpe(q, v, size=size) # Merge and reshape. x = self.scale * factor_att + crpe # Shape: [B, h, N, Ch] -> [B, N, h, Ch] -> [B, N, C]. x = x.transpose((0, 2, 1, 3)).reshape((B, N, C)) # Output projection. x = self.proj(x) x = self.proj_drop(x) # Shape: [B, N, C]. return xclass ConvPosEnc(nn.Layer): """ Convolutional Position Encoding. Note: This module is similar to the conditional position encoding in CPVT. """ def __init__(self, dim, k=3): super(ConvPosEnc, self).__init__() self.proj = nn.Conv2D(dim, dim, k, 1, k//2, groups=dim) def forward(self, x, size): B, N, C = x.shape H, W = size assert N == 1 + H * W # Extract CLS token and image tokens. # Shape: [B, 1, C], [B, H*W, C]. cls_token, img_tokens = x[:, :1], x[:, 1:] # Depthwise convolution. feat = img_tokens.transpose((0, 2, 1)).reshape((B, C, H, W)) x = self.proj(feat) + feat x = x.flatten(2).transpose((0, 2, 1)) # Combine with CLS token. x = paddle.concat((cls_token, x), axis=1) return xclass SerialBlock(nn.Layer): """ Serial block class. Note: In this implementation, each serial block only contains a conv-attention and a FFN (MLP) module. """ def __init__(self, dim, num_heads, mlp_ratio=4., qkv_bias=False, qk_scale=None, drop=0., attn_drop=0., drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm, epsilon=1e-6, shared_cpe=None, shared_crpe=None): super().__init__() # Conv-Attention. self.cpe = shared_cpe self.norm1 = norm_layer(dim, epsilon=epsilon) self.factoratt_crpe = FactorAtt_ConvRelPosEnc( dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop, shared_crpe=shared_crpe) self.drop_path = DropPath( drop_path) if drop_path > 0. else Identity() # MLP. self.norm2 = norm_layer(dim, epsilon=epsilon) mlp_hidden_dim = int(dim * mlp_ratio) self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop) def forward(self, x, size): # Conv-Attention. # Apply convolutional position encoding. x = self.cpe(x, size) cur = self.norm1(x) # Apply factorized attention and convolutional relative position encoding. cur = self.factoratt_crpe(cur, size) x = x + self.drop_path(cur) # MLP. cur = self.norm2(x) cur = self.mlp(cur) x = x + self.drop_path(cur) return xclass ParallelBlock(nn.Layer): """ Parallel block class. """ def __init__(self, dims, num_heads, mlp_ratios=[], qkv_bias=False, qk_scale=None, drop=0., attn_drop=0., drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm, epsilon=1e-6, shared_cpes=None, shared_crpes=None): super().__init__() # Conv-Attention. self.cpes = shared_cpes self.norm12 = norm_layer(dims[1], epsilon=epsilon) self.norm13 = norm_layer(dims[2], epsilon=epsilon) self.norm14 = norm_layer(dims[3], epsilon=epsilon) self.factoratt_crpe2 = FactorAtt_ConvRelPosEnc( dims[1], num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop, shared_crpe=shared_crpes[1] ) self.factoratt_crpe3 = FactorAtt_ConvRelPosEnc( dims[2], num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop, shared_crpe=shared_crpes[2] ) self.factoratt_crpe4 = FactorAtt_ConvRelPosEnc( dims[3], num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop, shared_crpe=shared_crpes[3] ) self.drop_path = DropPath( drop_path) if drop_path > 0. else Identity() # MLP. self.norm22 = norm_layer(dims[1], epsilon=epsilon) self.norm23 = norm_layer(dims[2], epsilon=epsilon) self.norm24 = norm_layer(dims[3], epsilon=epsilon) # In parallel block, we assume dimensions are the same and share the linear transformation. assert dims[1] == dims[2] == dims[3] assert mlp_ratios[1] == mlp_ratios[2] == mlp_ratios[3] mlp_hidden_dim = int(dims[1] * mlp_ratios[1]) self.mlp2 = self.mlp3 = self.mlp4 = Mlp( in_features=dims[1], hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop) def upsample(self, x, factor, size): """ Feature map up-sampling. """ return self.interpolate(x, scale_factor=factor, size=size) def downsample(self, x, factor, size): """ Feature map down-sampling. """ return self.interpolate(x, scale_factor=1.0/factor, size=size) def interpolate(self, x, scale_factor, size): """ Feature map interpolation. """ B, N, C = x.shape H, W = size assert N == 1 + H * W cls_token = x[:, :1, :] img_tokens = x[:, 1:, :] img_tokens = img_tokens.transpose((0, 2, 1)).reshape((B, C, H, W)) img_tokens = F.interpolate( img_tokens, scale_factor=scale_factor, mode='bilinear') img_tokens = img_tokens.reshape((B, C, -1)).transpose((0, 2, 1)) out = paddle.concat((cls_token, img_tokens), axis=1) return out def forward(self, x1, x2, x3, x4, sizes): _, (H2, W2), (H3, W3), (H4, W4) = sizes # Conv-Attention. x2 = self.cpes[1](x2, size=(H2, W2)) # Note: x1 is ignored. x3 = self.cpes[2](x3, size=(H3, W3)) x4 = self.cpes[3](x4, size=(H4, W4)) cur2 = self.norm12(x2) cur3 = self.norm13(x3) cur4 = self.norm14(x4) cur2 = self.factoratt_crpe2(cur2, size=(H2, W2)) cur3 = self.factoratt_crpe3(cur3, size=(H3, W3)) cur4 = self.factoratt_crpe4(cur4, size=(H4, W4)) upsample3_2 = self.upsample(cur3, factor=2, size=(H3, W3)) upsample4_3 = self.upsample(cur4, factor=2, size=(H4, W4)) upsample4_2 = self.upsample(cur4, factor=4, size=(H4, W4)) downsample2_3 = self.downsample(cur2, factor=2, size=(H2, W2)) downsample3_4 = self.downsample(cur3, factor=2, size=(H3, W3)) downsample2_4 = self.downsample(cur2, factor=4, size=(H2, W2)) cur2 = cur2 + upsample3_2 + upsample4_2 cur3 = cur3 + upsample4_3 + downsample2_3 cur4 = cur4 + downsample3_4 + downsample2_4 x2 = x2 + self.drop_path(cur2) x3 = x3 + self.drop_path(cur3) x4 = x4 + self.drop_path(cur4) # MLP. cur2 = self.norm22(x2) cur3 = self.norm23(x3) cur4 = self.norm24(x4) cur2 = self.mlp2(cur2) cur3 = self.mlp3(cur3) cur4 = self.mlp4(cur4) x2 = x2 + self.drop_path(cur2) x3 = x3 + self.drop_path(cur3) x4 = x4 + self.drop_path(cur4) return x1, x2, x3, x4class PatchEmbed(nn.Layer): """ Image to Patch Embedding """ def __init__(self, img_size=224, patch_size=16, in_chans=3, embed_dim=768): super().__init__() img_size = to_2tuple(img_size) patch_size = to_2tuple(patch_size) self.img_size = img_size self.patch_size = patch_size assert img_size[0] % patch_size[0] == 0 and img_size[1] % patch_size[1] == 0, f"img_size {img_size} should be divided by patch_size {patch_size}." # Note: self.H, self.W and self.num_patches are not used self.H, self.W = img_size[0] // patch_size[0], img_size[1] // patch_size[1] # since the image size may change on the fly. self.num_patches = self.H * self.W self.proj = nn.Conv2D(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size) self.norm = nn.LayerNorm(embed_dim) def forward(self, x): _, _, H, W = x.shape out_H, out_W = H // self.patch_size[0], W // self.patch_size[1] x = self.proj(x).flatten(2).transpose((0, 2, 1)) out = self.norm(x) return out, (out_H, out_W)class CoaT(nn.Layer): """ CoaT class. """ def __init__(self, img_size=224, patch_size=16, in_chans=3, embed_dims=[0, 0, 0, 0], serial_depths=[0, 0, 0, 0], parallel_depth=0, num_heads=0, mlp_ratios=[0, 0, 0, 0], qkv_bias=True, qk_scale=None, drop_rate=0., attn_drop_rate=0., drop_path_rate=0., norm_layer=nn.LayerNorm, epsilon=1e-6, return_interm_layers=False, out_features=None, crpe_window={3: 2, 5: 3, 7: 3}, class_dim=1000, **kwargs): super().__init__() self.return_interm_layers = return_interm_layers self.out_features = out_features self.class_dim = class_dim # Patch embeddings. self.patch_embed1 = PatchEmbed( img_size=img_size, patch_size=patch_size, in_chans=in_chans, embed_dim=embed_dims[0]) self.patch_embed2 = PatchEmbed( img_size=img_size // 4, patch_size=2, in_chans=embed_dims[0], embed_dim=embed_dims[1]) self.patch_embed3 = PatchEmbed( img_size=img_size // 8, patch_size=2, in_chans=embed_dims[1], embed_dim=embed_dims[2]) self.patch_embed4 = PatchEmbed( img_size=img_size // 16, patch_size=2, in_chans=embed_dims[2], embed_dim=embed_dims[3]) # Class tokens. self.cls_token1 = add_parameter( self, paddle.zeros((1, 1, embed_dims[0]))) self.cls_token2 = add_parameter( self, paddle.zeros((1, 1, embed_dims[1]))) self.cls_token3 = add_parameter( self, paddle.zeros((1, 1, embed_dims[2]))) self.cls_token4 = add_parameter( self, paddle.zeros((1, 1, embed_dims[3]))) # Convolutional position encodings. self.cpe1 = ConvPosEnc(dim=embed_dims[0], k=3) self.cpe2 = ConvPosEnc(dim=embed_dims[1], k=3) self.cpe3 = ConvPosEnc(dim=embed_dims[2], k=3) self.cpe4 = ConvPosEnc(dim=embed_dims[3], k=3) # Convolutional relative position encodings. self.crpe1 = ConvRelPosEnc( Ch=embed_dims[0] // num_heads, h=num_heads, window=crpe_window) self.crpe2 = ConvRelPosEnc( Ch=embed_dims[1] // num_heads, h=num_heads, window=crpe_window) self.crpe3 = ConvRelPosEnc( Ch=embed_dims[2] // num_heads, h=num_heads, window=crpe_window) self.crpe4 = ConvRelPosEnc( Ch=embed_dims[3] // num_heads, h=num_heads, window=crpe_window) # Disable stochastic depth. dpr = drop_path_rate assert dpr == 0.0 # Serial blocks 1. self.serial_blocks1 = nn.LayerList([ SerialBlock( dim=embed_dims[0], num_heads=num_heads, mlp_ratio=mlp_ratios[0], qkv_bias=qkv_bias, qk_scale=qk_scale, drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr, norm_layer=norm_layer, epsilon=epsilon, shared_cpe=self.cpe1, shared_crpe=self.crpe1 ) for _ in range(serial_depths[0])] ) # Serial blocks 2. self.serial_blocks2 = nn.LayerList([ SerialBlock( dim=embed_dims[1], num_heads=num_heads, mlp_ratio=mlp_ratios[1], qkv_bias=qkv_bias, qk_scale=qk_scale, drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr, norm_layer=norm_layer, epsilon=epsilon, shared_cpe=self.cpe2, shared_crpe=self.crpe2 ) for _ in range(serial_depths[1])] ) # Serial blocks 3. self.serial_blocks3 = nn.LayerList([ SerialBlock( dim=embed_dims[2], num_heads=num_heads, mlp_ratio=mlp_ratios[2], qkv_bias=qkv_bias, qk_scale=qk_scale, drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr, norm_layer=norm_layer, epsilon=epsilon, shared_cpe=self.cpe3, shared_crpe=self.crpe3 ) for _ in range(serial_depths[2])] ) # Serial blocks 4. self.serial_blocks4 = nn.LayerList([ SerialBlock( dim=embed_dims[3], num_heads=num_heads, mlp_ratio=mlp_ratios[3], qkv_bias=qkv_bias, qk_scale=qk_scale, drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr, norm_layer=norm_layer, epsilon=epsilon, shared_cpe=self.cpe4, shared_crpe=self.crpe4 ) for _ in range(serial_depths[3])] ) # Parallel blocks. self.parallel_depth = parallel_depth if self.parallel_depth > 0: self.parallel_blocks = nn.LayerList([ ParallelBlock( dims=embed_dims, num_heads=num_heads, mlp_ratios=mlp_ratios, qkv_bias=qkv_bias, qk_scale=qk_scale, drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr, norm_layer=norm_layer, epsilon=epsilon, shared_cpes=[self.cpe1, self.cpe2, self.cpe3, self.cpe4], shared_crpes=[self.crpe1, self.crpe2, self.crpe3, self.crpe4] ) for _ in range(parallel_depth)] ) # Classification head(s). if not self.return_interm_layers: self.norm1 = norm_layer(embed_dims[0], epsilon=epsilon) self.norm2 = norm_layer(embed_dims[1], epsilon=epsilon) self.norm3 = norm_layer(embed_dims[2], epsilon=epsilon) self.norm4 = norm_layer(embed_dims[3], epsilon=epsilon) # CoaT series: Aggregate features of last three scales for classification. if self.parallel_depth > 0: assert embed_dims[1] == embed_dims[2] == embed_dims[3] self.aggregate = nn.Conv1D( in_channels=3, out_channels=1, kernel_size=1) self.head = nn.Linear(embed_dims[3], class_dim) else: # CoaT-Lite series: Use feature of last scale for classification. self.head = nn.Linear(embed_dims[3], class_dim) # Initialize weights. trunc_normal_(self.cls_token1) trunc_normal_(self.cls_token2) trunc_normal_(self.cls_token3) trunc_normal_(self.cls_token4) self.apply(self._init_weights) def _init_weights(self, m): if isinstance(m, nn.Linear): trunc_normal_(m.weight) if isinstance(m, nn.Linear) and m.bias is not None: zeros_(m.bias) elif isinstance(m, nn.LayerNorm): zeros_(m.bias) ones_(m.weight) def insert_cls(self, x, cls_token): """ Insert CLS token. """ cls_tokens = cls_token.expand((x.shape[0], -1, -1)) x = paddle.concat((cls_tokens, x), axis=1) return x def remove_cls(self, x): """ Remove CLS token. """ return x[:, 1:, :] def forward_features(self, x0): B = x0.shape[0] # Serial blocks 1. x1, (H1, W1) = self.patch_embed1(x0) x1 = self.insert_cls(x1, self.cls_token1) for blk in self.serial_blocks1: x1 = blk(x1, size=(H1, W1)) x1_nocls = self.remove_cls(x1) x1_nocls = x1_nocls.reshape( (B, H1, W1, -1) ).transpose((0, 3, 1, 2)) # Serial blocks 2. x2, (H2, W2) = self.patch_embed2(x1_nocls) x2 = self.insert_cls(x2, self.cls_token2) for blk in self.serial_blocks2: x2 = blk(x2, size=(H2, W2)) x2_nocls = self.remove_cls(x2) x2_nocls = x2_nocls.reshape( (B, H2, W2, -1) ).transpose((0, 3, 1, 2)) # Serial blocks 3. x3, (H3, W3) = self.patch_embed3(x2_nocls) x3 = self.insert_cls(x3, self.cls_token3) for blk in self.serial_blocks3: x3 = blk(x3, size=(H3, W3)) x3_nocls = self.remove_cls(x3) x3_nocls = x3_nocls.reshape( (B, H3, W3, -1) ).transpose((0, 3, 1, 2)) # Serial blocks 4. x4, (H4, W4) = self.patch_embed4(x3_nocls) x4 = self.insert_cls(x4, self.cls_token4) for blk in self.serial_blocks4: x4 = blk(x4, size=(H4, W4)) x4_nocls = self.remove_cls(x4) x4_nocls = x4_nocls.reshape( (B, H4, W4, -1) ).transpose((0, 3, 1, 2)) # Only serial blocks: Early return. if self.parallel_depth == 0: # Return intermediate features for down-stream tasks (e.g. Deformable DETR and Detectron2). if self.return_interm_layers: feat_out = {} if 'x1_nocls' in self.out_features: feat_out['x1_nocls'] = x1_nocls if 'x2_nocls' in self.out_features: feat_out['x2_nocls'] = x2_nocls if 'x3_nocls' in self.out_features: feat_out['x3_nocls'] = x3_nocls if 'x4_nocls' in self.out_features: feat_out['x4_nocls'] = x4_nocls return feat_out else: # Return features for classification. x4 = self.norm4(x4) x4_cls = x4[:, 0] return x4_cls # Parallel blocks. for blk in self.parallel_blocks: x1, x2, x3, x4 = blk(x1, x2, x3, x4, sizes=[ (H1, W1), (H2, W2), (H3, W3), (H4, W4)]) # Return intermediate features for down-stream tasks (e.g. Deformable DETR and Detectron2). if self.return_interm_layers: feat_out = {} if 'x1_nocls' in self.out_features: x1_nocls = self.remove_cls(x1) x1_nocls = x1_nocls.reshape( (B, H1, W1, -1) ).transpose((0, 3, 1, 2)) feat_out['x1_nocls'] = x1_nocls if 'x2_nocls' in self.out_features: x2_nocls = self.remove_cls(x2) x2_nocls = x2_nocls.reshape( (B, H2, W2, -1) ).transpose((0, 3, 1, 2)) feat_out['x2_nocls'] = x2_nocls if 'x3_nocls' in self.out_features: x3_nocls = self.remove_cls(x3) x3_nocls = x3_nocls.reshape( (B, H3, W3, -1) ).transpose((0, 3, 1, 2)) feat_out['x3_nocls'] = x3_nocls if 'x4_nocls' in self.out_features: x4_nocls = self.remove_cls(x4) x4_nocls = x4_nocls.reshape( (B, H4, W4, -1) ).transpose((0, 3, 1, 2)) feat_out['x4_nocls'] = x4_nocls return feat_out else: x2 = self.norm2(x2) x3 = self.norm3(x3) x4 = self.norm4(x4) x2_cls = x2[:, :1] # Shape: [B, 1, C]. x3_cls = x3[:, :1] x4_cls = x4[:, :1] # Shape: [B, 3, C]. merged_cls = paddle.concat((x2_cls, x3_cls, x4_cls), axis=1) # Shape: [B, C]. merged_cls = self.aggregate(merged_cls).squeeze(axis=1) return merged_cls def forward(self, x): # Return intermediate features (for down-stream tasks). if self.return_interm_layers: return self.forward_features(x) else: # Return features for classification. x = self.forward_features(x) x = self.head(x) return x
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/paddle/fluid/layers/utils.py:26: DeprecationWarning: `np.int` is a deprecated alias for the builtin `int`. To silence this warning, use `int` by itself. Doing this will not modify any behavior and is safe. When replacing `np.int`, you may wish to use e.g. `np.int64` or `np.int32` to specify the precision. If you wish to review your current use, check the release note link for additional information.Deprecated in NumPy 1.20; for more details and guidance: https://numpy.org/devdocs/release/1.20.0-notes.html#deprecations def convert_to_list(value, n, name, dtype=np.int):
预设模型
In [2]
def coat_ti(pretrained=False, **kwargs): model = CoaT( patch_size=4, embed_dims=[152, 152, 152, 152], serial_depths=[2, 2, 2, 2], parallel_depth=6, num_heads=8, mlp_ratios=[4, 4, 4, 4], **kwargs ) if pretrained: params = paddle.load('data/data86865/coat_tiny.pdparams') model.set_dict(params) return modeldef coat_m(pretrained=False, **kwargs): model = CoaT( patch_size=4, embed_dims=[152, 216, 216, 216], serial_depths=[2, 2, 2, 2], parallel_depth=6, num_heads=8, mlp_ratios=[4, 4, 4, 4], **kwargs ) if pretrained: params = paddle.load('data/data86865/coat_mini.pdparams') model.set_dict(params) return modeldef coat_lite_ti(pretrained=False, **kwargs): model = CoaT( patch_size=4, embed_dims=[64, 128, 256, 320], serial_depths=[2, 2, 2, 2], parallel_depth=0, num_heads=8, mlp_ratios=[8, 8, 4, 4], **kwargs ) if pretrained: params = paddle.load('data/data86865/coat_lite_tiny.pdparams') model.set_dict(params) return modeldef coat_lite_m(pretrained=False, **kwargs): model = CoaT( patch_size=4, embed_dims=[64, 128, 320, 512], serial_depths=[2, 2, 2, 2], parallel_depth=0, num_heads=8, mlp_ratios=[8, 8, 4, 4], **kwargs ) if pretrained: params = paddle.load('data/data86865/coat_lite_mini.pdparams') model.set_dict(params) return modeldef coat_lite_s(pretrained=False, **kwargs): model = CoaT( patch_size=4, embed_dims=[64, 128, 320, 512], serial_depths=[3, 4, 6, 3], parallel_depth=0, num_heads=8, mlp_ratios=[8, 8, 4, 4], **kwargs ) if pretrained: params = paddle.load('data/data86865/coat_lite_small.pdparams') model.set_dict(params) return model
模型测试
In [3]
model = coat_ti(True)random_input = paddle.randn((1, 3, 224, 224))out = model(random_input)print(out.shape)model.eval()out = model(random_input)print(out.shape)
[1, 1000][1, 1000]
精度验证
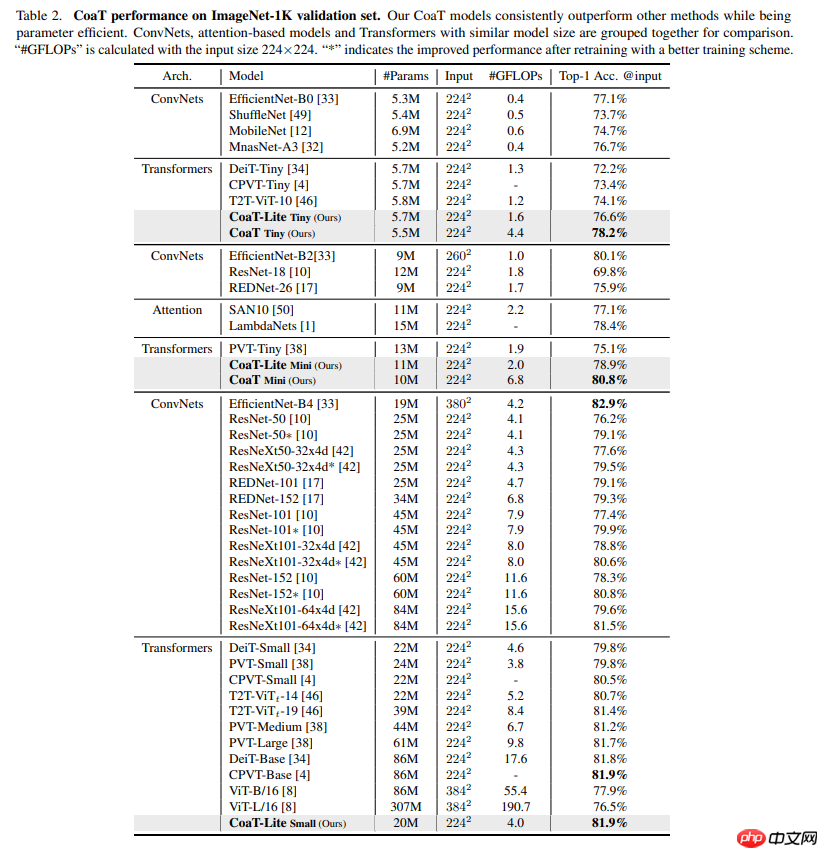
该模型的论文标称精度如下表:
解压数据集
In [4]
!mkdir ~/data/ILSVRC2012!tar -xf ~/data/data68594/ILSVRC2012_img_val.tar -C ~/data/ILSVRC2012
模型验证
In [6]
import osimport cv2import numpy as npimport paddleimport paddle.vision.transforms as Tfrom PIL import Image# 构建数据集class ILSVRC2012(paddle.io.Dataset): def __init__(self, root, label_list, transform, backend='pil'): self.transform = transform self.root = root self.label_list = label_list self.backend = backend self.load_datas() def load_datas(self): self.imgs = [] self.labels = [] with open(self.label_list, 'r') as f: for line in f: img, label = line[:-1].split(' ') self.imgs.append(os.path.join(self.root, img)) self.labels.append(int(label)) def __getitem__(self, idx): label = self.labels[idx] image = self.imgs[idx] if self.backend=='cv2': image = cv2.imread(image) else: image = Image.open(image).convert('RGB') image = self.transform(image) return image.astype('float32'), np.array(label).astype('int64') def __len__(self): return len(self.imgs)val_transforms = T.Compose([ T.Resize(248, interpolation='bicubic'), T.CenterCrop(224), T.ToTensor(), T.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])])# 配置模型model = coat_lite_s(pretrained=True)model = paddle.Model(model)model.prepare(metrics=paddle.metric.Accuracy(topk=(1, 5)))# 配置数据集val_dataset = ILSVRC2012('data/ILSVRC2012', transform=val_transforms, label_list='data/data68594/val_list.txt', backend='pil')# 模型验证acc = model.evaluate(val_dataset, batch_size=256, num_workers=0, verbose=1)print(acc)
{'acc_top1': 0.81832, 'acc_top5': 0.95582}
总结
介绍了一种基于 Transformer 的图像分类器——CoaTCoaT 模型通过 Co-Scale 和 Conv-Attentional 机制设计为 Vision Transformer 提供了丰富的多尺度和上下文建模功能在性能表现方面优于 T2T-ViT、DeiT、PVT 等网络也使用 Paddle2.0 实现了 CoaT 模型,并加载官方预训练模型参数实现精度的对齐
以上就是Paddle2.0:浅析并实现 CoaT 模型的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/67194.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 



























