CycleMLP是用于视觉识别和密集预测的通用主干,相较MLP Mixer等模型,能处理不同图像大小,以线性计算复杂度实现局部窗口操作。其核心是Cycle FC,结合并行算子与Channel MLP,有5种模型。在ImageNet – 1K和ADE20K上表现优异,参数和计算量更少。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

引入
最近各种用于视觉方向的 MLP 模型层出不穷,比如:MLP Mixer、ResMLP 和 gMLP 等等今天就来简单介绍一个刚刚开源的新工作 CycleMLP,一种全新的用于视觉识别和密集预测的通用主干
相关资料
论文:CycleMLP: A MLP-like Architecture for Dense Prediction官方实现:ShoufaChen/CycleMLP
主要贡献
本文提出了一种简单的类 MLP 结构 CycleMLP,它是视觉识别和密集预测的通用主干,不同于 Modern MLP 结构,如 MLP Mixer、ResMLP 和 gMLP,后者的结构与图像大小相关,因此在目标检测和分割中不可行。与 Modern MLP 的方法相比,CycleMLP 有两个优点:(1) 它可以处理不同的图像大小(2) 利用局部窗口实现了图像大小的线性计算复杂度。相比之下,以前的 MLP 由于其完全空间连接而具有二次计算。作者建立了一系列模型,这些模型超越了现有的 MLP,在 ImageNet-1K 分类任务上与最先进的 Vision Transformer 模型,如 Swin-Transformer(83.3%)相比具有相当的精度(83.2%),但模型的参数量和 FLOPs 较少。同时,作者扩展了类 MLP 模型的适用性,使其成为密集预测任务的通用主干。CycleMLP 旨在为 MLP 模型的目标检测、实例分割和语义分割提供一个有竞争力的基线。特别是,CycleMLP 在 ADE20K 验证集上达到了 45.1 mIoU,与 Swin-Transformer(45.2 mIoU)相当。
Motivation
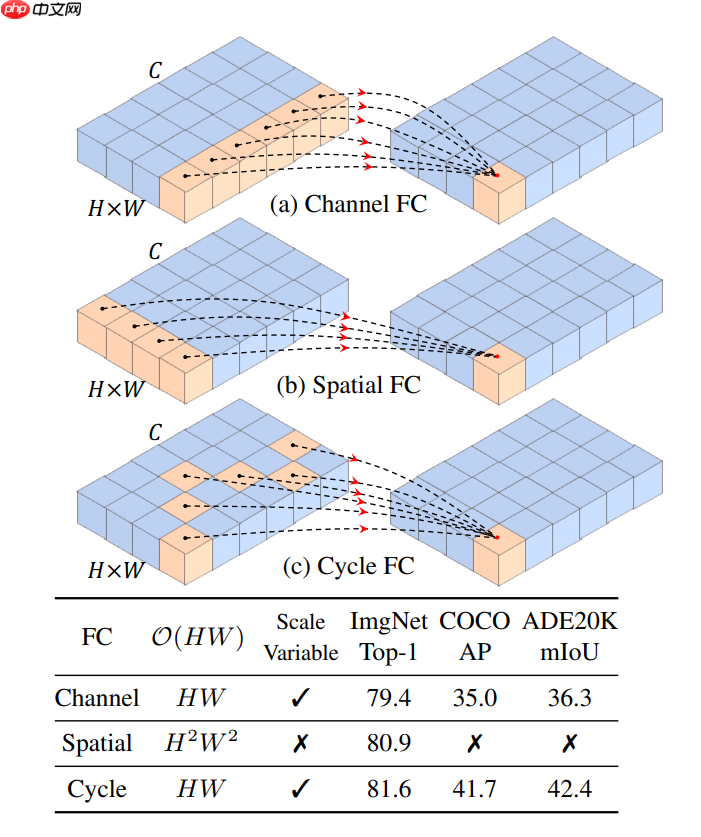
对比 Channel FC 和 Spatial FC:(a) Channel FC 在空间大小为 “1” 的通道维度中聚合要素。它处理各种输入尺度,但不能学习空间上下文。(b) Spatial FC 空间维度上有一个全球感受野。然而,它的参数大小是固定的,并且对于图像尺度具有二次计算复杂度。(c) Cycle FC 具有与 Channel FC 相同的线性复杂度,并且具有比 Channel FC 更大的感受野。
MLP block
对比 MLP Mixer:(a) MLP Mixer 利用沿空间维度的 Spatial MLP 进行上下文聚合。当输入比例变化并且计算复杂度与图像尺寸成二次函数关系时,该算子不能工作。(b) CycleMLP 使用 Cycle FC 进行空间投影,它能够处理任意比例,并且具有线性复杂度

Cycle FC Block
Cycle FC Block 如上图(b)所示。与上图(a)所示的开创性 MLP-Mixer Block 相比,Cycle FC Block 的关键区别在于,它利用作者提出的 Cycle FC 进行空间投影,并在上下文聚合和信息通信方面推进了模型。具体来说,Cycle FC Block 由三个并行的 Cycle FC 算子组成,后面是一个具有两个线性层的 Channel MLP 和一个介于两者之间的 GELU 非线性激活函数。在并行 Cycle FC 层和 Channel MLP 模块之前应用一个层形式 LayeNorm 层,和每个模块之后应用残差连接。
Pseudo-Kernel
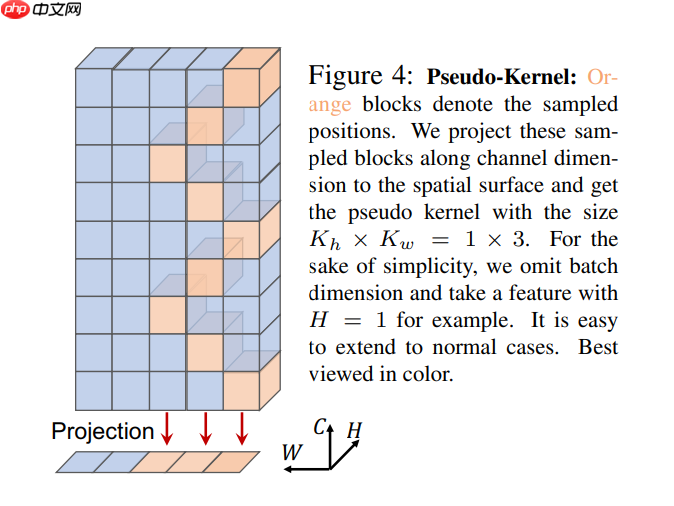
在 Cycle FC 中,作者引入了 Pseudo-Kernel 的概念。如下图所示,将 Cycle FC 的采样点(橙色块)投影到空间表面,并将投影区域定义为伪核大小。
 爱图表
爱图表
AI驱动的智能化图表创作平台
 305 查看详情
305 查看详情 
模型架构
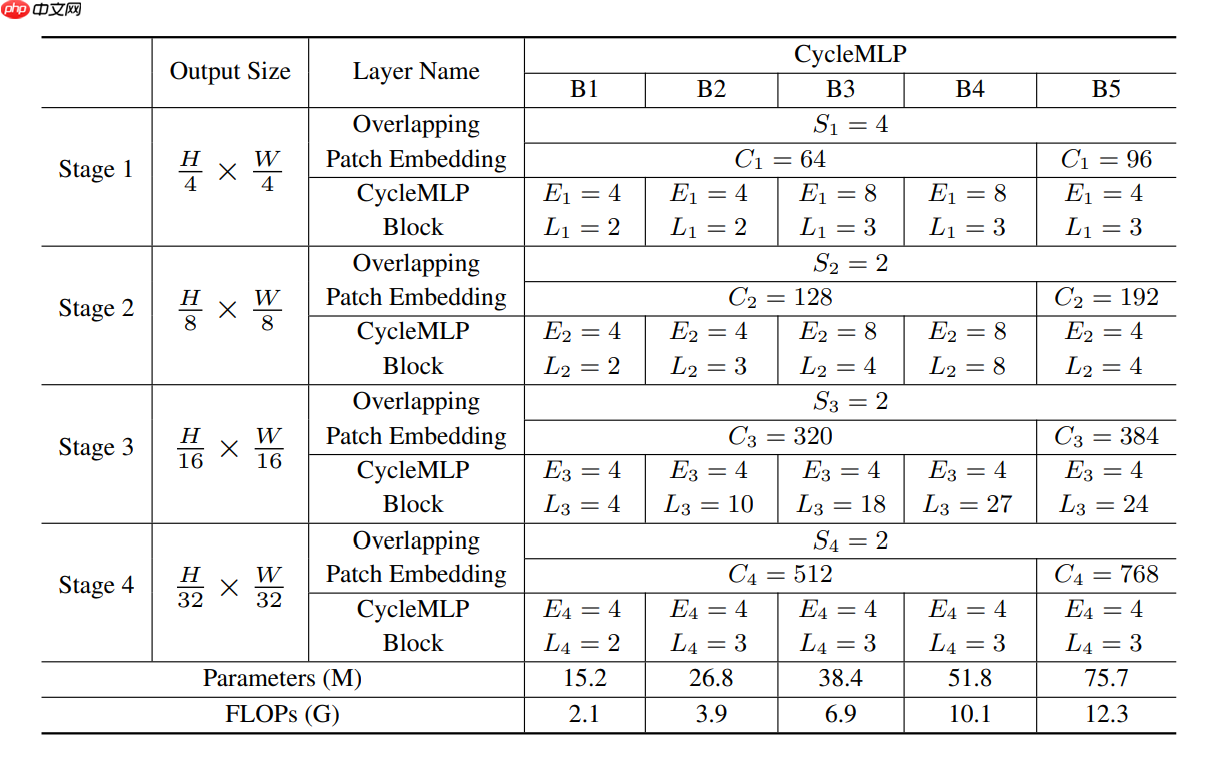
作者设计五个不同大小的 CycleMLP 模型,具体细节如下表所示:
精度表现
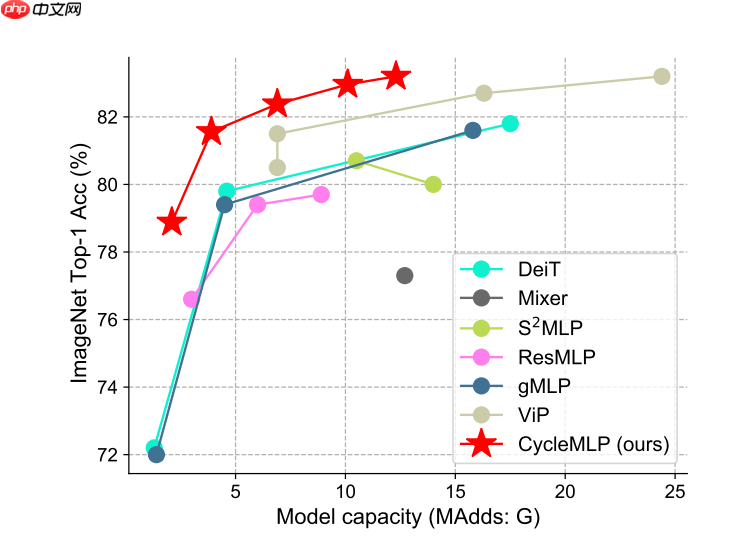
对比其他视觉 MLP 和 Transformers,CycleMLP 的模型精度如下图所示:
代码实现
更新 Paddle
由于一些奇奇怪怪的原因,需要先手动更新 Paddle 的版本In [1]
!pip install paddlepaddle-gpu==2.1.1.post101 -f https://paddlepaddle.org.cn/whl/mkl/stable.html
模型搭建
In [2]
import osimport mathimport paddleimport paddle.nn as nnfrom common import DropPath, Identityfrom common import add_parameter, _calculate_fan_in_and_fan_out, to_2tuplefrom common import zeros_, ones_, trunc_normal_from paddle.vision.ops import deform_conv2dfrom paddle.nn.initializer import Uniform, KaimingNormal class Mlp(nn.Layer): def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.): super().__init__() out_features = out_features or in_features hidden_features = hidden_features or in_features self.fc1 = nn.Linear(in_features, hidden_features) self.act = act_layer() self.fc2 = nn.Linear(hidden_features, out_features) self.drop = nn.Dropout(drop) def forward(self, x): x = self.fc1(x) x = self.act(x) x = self.drop(x) x = self.fc2(x) x = self.drop(x) return xclass CycleFC(nn.Layer): def __init__( self, in_channels: int, out_channels: int, kernel_size, # re-defined kernel_size, represent the spatial area of staircase FC stride: int = 1, padding: int = 0, dilation: int = 1, groups: int = 1, bias: bool = True, ): super(CycleFC, self).__init__() if in_channels % groups != 0: raise ValueError('in_channels must be divisible by groups') if out_channels % groups != 0: raise ValueError('out_channels must be divisible by groups') if stride != 1: raise ValueError('stride must be 1') if padding != 0: raise ValueError('padding must be 0') self.in_channels = in_channels self.out_channels = out_channels self.kernel_size = kernel_size self.stride = to_2tuple(stride) self.padding = to_2tuple(padding) self.dilation = to_2tuple(dilation) self.groups = groups self.weight = add_parameter(self, paddle.empty((out_channels, in_channels // groups, 1, 1))) # kernel size == 1 if bias: self.bias = add_parameter(self, paddle.empty((out_channels,))) else: self.add_parameter('bias', None) self.register_buffer('offset', self.gen_offset()) self.reset_parameters() def reset_parameters(self) -> None: KaimingNormal(self.weight) if self.bias is not None: fan_in, _ = _calculate_fan_in_and_fan_out(self.weight) bound = 1 / math.sqrt(fan_in) Uniform(low=-bound, high=bound)(self.bias) def gen_offset(self): """ offset (Tensor[batch_size, 2 * offset_groups * kernel_height * kernel_width, out_height, out_width]): offsets to be applied for each position in the convolution kernel. """ offset = paddle.empty((1, self.in_channels*2, 1, 1)) start_idx = (self.kernel_size[0] * self.kernel_size[1]) // 2 assert self.kernel_size[0] == 1 or self.kernel_size[1] == 1, self.kernel_size for i in range(self.in_channels): if self.kernel_size[0] == 1: offset[0, 2 * i + 0, 0, 0] = 0 offset[0, 2 * i + 1, 0, 0] = (i + start_idx) % self.kernel_size[1] - (self.kernel_size[1] // 2) else: offset[0, 2 * i + 0, 0, 0] = (i + start_idx) % self.kernel_size[0] - (self.kernel_size[0] // 2) offset[0, 2 * i + 1, 0, 0] = 0 return offset def forward(self, input): """ Args: input (Tensor[batch_size, in_channels, in_height, in_width]): input tensor """ B, C, H, W = input.shape return deform_conv2d(input, self.offset.expand((B, -1, H, W)), self.weight, self.bias, stride=self.stride, padding=self.padding, dilation=self.dilation, deformable_groups=self.in_channels)class CycleMLP(nn.Layer): def __init__(self, dim, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0.): super().__init__() self.mlp_c = nn.Linear(dim, dim, bias_attr=qkv_bias) self.sfc_h = CycleFC(dim, dim, (1, 3), 1, 0) self.sfc_w = CycleFC(dim, dim, (3, 1), 1, 0) self.reweight = Mlp(dim, dim // 4, dim * 3) self.proj = nn.Linear(dim, dim) self.proj_drop = nn.Dropout(proj_drop) def forward(self, x): B, H, W, C = x.shape h = self.sfc_h(x.transpose((0, 3, 1, 2))).transpose((0, 2, 3, 1)) w = self.sfc_w(x.transpose((0, 3, 1, 2))).transpose((0, 2, 3, 1)) c = self.mlp_c(x) a = (h + w + c).transpose((0, 3, 1, 2)).flatten(2).mean(2) a = nn.functional.softmax(self.reweight(a).reshape((B, C, 3)).transpose((2, 0, 1)), axis=0).unsqueeze(2).unsqueeze(2) x = h * a[0] + w * a[1] + c * a[2] x = self.proj(x) x = self.proj_drop(x) return xclass CycleBlock(nn.Layer): def __init__(self, dim, mlp_ratio=4., qkv_bias=False, qk_scale=None, drop=0., attn_drop=0., drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm, skip_lam=1.0, mlp_fn=CycleMLP): super().__init__() self.norm1 = norm_layer(dim) self.attn = mlp_fn(dim, qkv_bias=qkv_bias, qk_scale=None, attn_drop=attn_drop) # NOTE: drop path for stochastic depth, we shall see if this is better than dropout here self.drop_path = DropPath(drop_path) if drop_path > 0. else Identity() self.norm2 = norm_layer(dim) mlp_hidden_dim = int(dim * mlp_ratio) self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer) self.skip_lam = skip_lam def forward(self, x): x = x + self.drop_path(self.attn(self.norm1(x))) / self.skip_lam x = x + self.drop_path(self.mlp(self.norm2(x))) / self.skip_lam return xclass PatchEmbedOverlapping(nn.Layer): """ 2D Image to Patch Embedding with overlapping """ def __init__(self, patch_size=16, stride=16, padding=0, in_chans=3, embed_dim=768, norm_layer=None, groups=1): super().__init__() patch_size = to_2tuple(patch_size) stride = to_2tuple(stride) padding = to_2tuple(padding) self.patch_size = patch_size # remove image_size in model init to support dynamic image size self.proj = nn.Conv2D(in_chans, embed_dim, kernel_size=patch_size, stride=stride, padding=padding, groups=groups) self.norm = norm_layer(embed_dim) if norm_layer else Identity() def forward(self, x): x = self.proj(x) return xclass Downsample(nn.Layer): """ Downsample transition stage """ def __init__(self, in_embed_dim, out_embed_dim, patch_size): super().__init__() assert patch_size == 2, patch_size self.proj = nn.Conv2D(in_embed_dim, out_embed_dim, kernel_size=(3, 3), stride=(2, 2), padding=1) def forward(self, x): x = x.transpose((0, 3, 1, 2)) x = self.proj(x) # B, C, H, W x = x.transpose((0, 2, 3, 1)) return xdef basic_blocks(dim, index, layers, mlp_ratio=3., qkv_bias=False, qk_scale=None, attn_drop=0., drop_path_rate=0., skip_lam=1.0, mlp_fn=CycleMLP, **kwargs): blocks = [] for block_idx in range(layers[index]): block_dpr = drop_path_rate * (block_idx + sum(layers[:index])) / (sum(layers) - 1) blocks.append(CycleBlock(dim, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, drop_path=block_dpr, skip_lam=skip_lam, mlp_fn=mlp_fn)) blocks = nn.Sequential(*blocks) return blocksclass CycleNet(nn.Layer): """ CycleMLP Network """ def __init__(self, layers, img_size=224, patch_size=4, in_chans=3, num_classes=1000, embed_dims=None, transitions=None, segment_dim=None, mlp_ratios=None, skip_lam=1.0, qkv_bias=False, qk_scale=None, drop_rate=0., attn_drop_rate=0., drop_path_rate=0., norm_layer=nn.LayerNorm, mlp_fn=CycleMLP, fork_feat=False): super().__init__() if not fork_feat: self.num_classes = num_classes self.fork_feat = fork_feat self.patch_embed = PatchEmbedOverlapping(patch_size=7, stride=4, padding=2, in_chans=3, embed_dim=embed_dims[0]) network = [] for i in range(len(layers)): stage = basic_blocks(embed_dims[i], i, layers, mlp_ratio=mlp_ratios[i], qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop_rate, drop_path_rate=drop_path_rate, norm_layer=norm_layer, skip_lam=skip_lam, mlp_fn=mlp_fn) network.append(stage) if i >= len(layers) - 1: break if transitions[i] or embed_dims[i] != embed_dims[i+1]: patch_size = 2 if transitions[i] else 1 network.append(Downsample(embed_dims[i], embed_dims[i+1], patch_size)) self.network = nn.LayerList(network) if self.fork_feat: # add a norm layer for each output self.out_indices = [0, 2, 4, 6] for i_emb, i_layer in enumerate(self.out_indices): if i_emb == 0 and os.environ.get('FORK_LAST3', None): # TODO: more elegant way """For RetinaNet, `start_level=1`. The first norm layer will not used. cmd: `FORK_LAST3=1 python -m torch.distributed.launch ...` """ layer = Identity() else: layer = norm_layer(embed_dims[i_emb]) layer_name = f'norm{i_layer}' self.add_module(layer_name, layer) else: # Classifier head self.norm = norm_layer(embed_dims[-1]) self.head = nn.Linear(embed_dims[-1], num_classes) if num_classes > 0 else Identity() self.apply(self.cls_init_weights) def cls_init_weights(self, m): if isinstance(m, nn.Linear): trunc_normal_(m.weight) if isinstance(m, nn.Linear) and m.bias is not None: zeros_(m.bias) elif isinstance(m, nn.LayerNorm): zeros_(m.bias) ones_(m.weight) elif isinstance(m, CycleFC): trunc_normal_(m.weight) zeros_(m.bias) def forward_embeddings(self, x): x = self.patch_embed(x) # B,C,H,W-> B,H,W,C x = x.transpose((0, 2, 3, 1)) return x def forward_tokens(self, x): outs = [] for idx, block in enumerate(self.network): x = block(x) if self.fork_feat and idx in self.out_indices: norm_layer = getattr(self, f'norm{idx}') x_out = norm_layer(x) outs.append(x_out.transpose((0, 3, 1, 2))) if self.fork_feat: return outs B, H, W, C = x.shape x = x.reshape((B, -1, C)) return x def forward(self, x): x = self.forward_embeddings(x) # B, H, W, C -> B, N, C x = self.forward_tokens(x) if self.fork_feat: return x x = self.norm(x) cls_out = self.head(x.mean(1)) return cls_out
预设模型
In [3]
def CycleMLP_B1(pretrained=False, **kwargs): transitions = [True, True, True, True] layers = [2, 2, 4, 2] mlp_ratios = [4, 4, 4, 4] embed_dims = [64, 128, 320, 512] model = CycleNet(layers, embed_dims=embed_dims, patch_size=7, transitions=transitions, mlp_ratios=mlp_ratios, mlp_fn=CycleMLP, **kwargs) if pretrained: params = paddle.load('data/data101687/CycleMLP_B1.pdparams') model.set_dict(params) return modeldef CycleMLP_B2(pretrained=False, **kwargs): transitions = [True, True, True, True] layers = [2, 3, 10, 3] mlp_ratios = [4, 4, 4, 4] embed_dims = [64, 128, 320, 512] model = CycleNet(layers, embed_dims=embed_dims, patch_size=7, transitions=transitions, mlp_ratios=mlp_ratios, mlp_fn=CycleMLP, **kwargs) if pretrained: params = paddle.load('data/data101687/CycleMLP_B2.pdparams') model.set_dict(params) return modeldef CycleMLP_B3(pretrained=False, **kwargs): transitions = [True, True, True, True] layers = [3, 4, 18, 3] mlp_ratios = [8, 8, 4, 4] embed_dims = [64, 128, 320, 512] model = CycleNet(layers, embed_dims=embed_dims, patch_size=7, transitions=transitions, mlp_ratios=mlp_ratios, mlp_fn=CycleMLP, **kwargs) if pretrained: params = paddle.load('data/data101687/CycleMLP_B3.pdparams') model.set_dict(params) return modeldef CycleMLP_B4(pretrained=False, **kwargs): transitions = [True, True, True, True] layers = [3, 8, 27, 3] mlp_ratios = [8, 8, 4, 4] embed_dims = [64, 128, 320, 512] model = CycleNet(layers, embed_dims=embed_dims, patch_size=7, transitions=transitions, mlp_ratios=mlp_ratios, mlp_fn=CycleMLP, **kwargs) if pretrained: params = paddle.load('data/data101687/CycleMLP_B4.pdparams') model.set_dict(params) return modeldef CycleMLP_B5(pretrained=False, **kwargs): transitions = [True, True, True, True] layers = [3, 4, 24, 3] mlp_ratios = [4, 4, 4, 4] embed_dims = [96, 192, 384, 768] model = CycleNet(layers, embed_dims=embed_dims, patch_size=7, transitions=transitions, mlp_ratios=mlp_ratios, mlp_fn=CycleMLP, **kwargs) if pretrained: params = paddle.load('data/data101687/CycleMLP_B5.pdparams') model.set_dict(params) return model
模型测试
In [4]
model = CycleMLP_B1(pretrained=True)x = paddle.randn((1, 3, 224, 224))out = model(x)print(out.shape)model.eval()out = model(x)print(out.shape)
[1, 1000][1, 1000]
精度测试
标称精度
官方开源项目中的标称精度如下表所示:
CycleMLP-B115M2.1G78.9%CycleMLP-B227M3.9G81.6%CycleMLP-B338M6.9G82.4%CycleMLP-B452M10.1G83.0%CycleMLP-B576M12.3G83.2%
解压数据集
解压 ImageNet-1k 的验证集In [5]
!mkdir ~/data/ILSVRC2012!tar -xf ~/data/data68594/ILSVRC2012_img_val.tar -C ~/data/ILSVRC2012
模型验证
由于高层 API 的代码在 AIStudio + Paddle 2.1.0 环境中会崩溃,所以这里就运行不了了In [7]
import osimport cv2import numpy as npimport paddleimport paddle.vision.transforms as Tfrom PIL import Image# 构建数据集class ILSVRC2012(paddle.io.Dataset): def __init__(self, root, label_list, transform, backend='pil'): self.transform = transform self.root = root self.label_list = label_list self.backend = backend self.load_datas() def load_datas(self): self.imgs = [] self.labels = [] with open(self.label_list, 'r') as f: for line in f: img, label = line[:-1].split(' ') self.imgs.append(os.path.join(self.root, img)) self.labels.append(int(label)) def __getitem__(self, idx): label = self.labels[idx] image = self.imgs[idx] if self.backend=='cv2': image = cv2.imread(image) else: image = Image.open(image).convert('RGB') image = self.transform(image) return image.astype('float32'), np.array(label).astype('int64') def __len__(self): return len(self.imgs)val_transforms = T.Compose([ T.Resize(248, interpolation='bicubic'), T.CenterCrop(224), T.ToTensor(), T.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])])# 配置模型model = CycleMLP_B1(pretrained=True)model = paddle.Model(model)model.prepare(metrics=paddle.metric.Accuracy(topk=(1, 5)))# 配置数据集val_dataset = ILSVRC2012('data/ILSVRC2012', transform=val_transforms, label_list='data/data68594/val_list.txt', backend='pil')# 模型验证acc = model.evaluate(val_dataset, batch_size=8, num_workers=0, verbose=1)print(acc)
{'acc_top1': 0.78848, 'acc_top5': 0.94604}
总结
CycleMLP 是一种全新的能够用于密集预测的视觉 MLP 模型,更加适用于目标检测或者图像分割任务中在精度表现上,相比以往的 MLP 模型也有了进一步的提升。
以上就是浅析并实现 CycleMLP,一种用于密集预测的类 MLP 模型的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/743495.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫