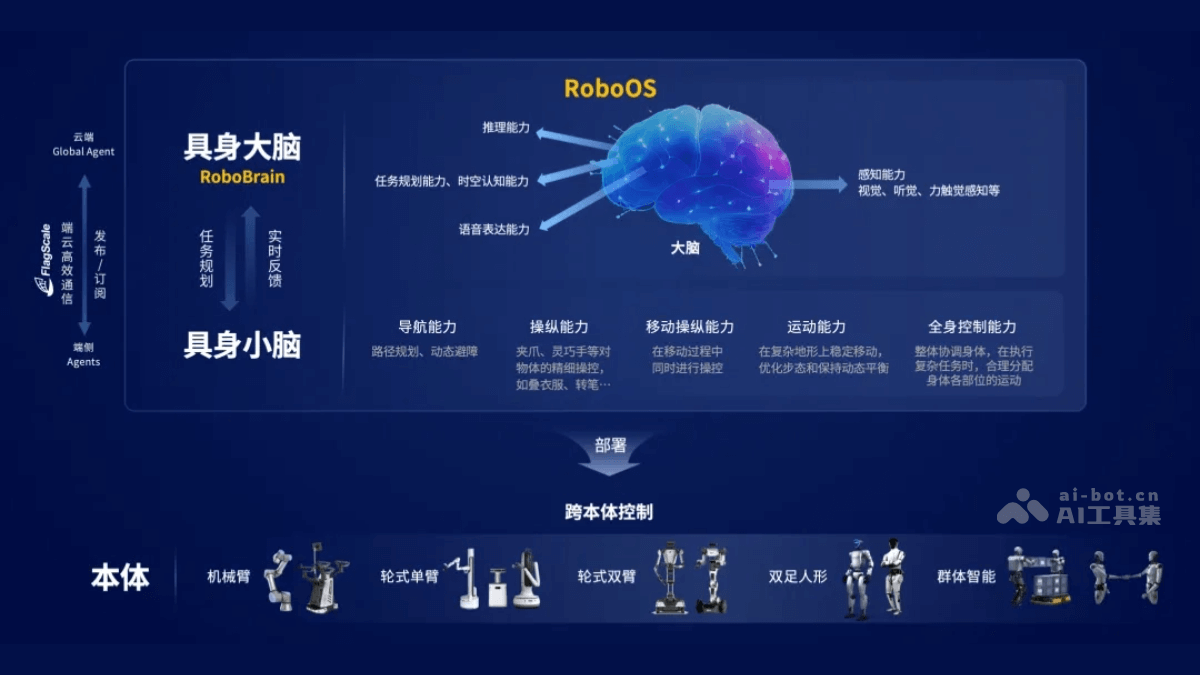
智源研究院推出首个跨本体具身大小脑协作框架——r%ignore_a_1%boos。该框架采用“大脑-小脑”分层架构,具身大脑robobrain负责全局感知和决策,小脑技能库则专注于低延迟精准执行。 跨机器人数据中枢实时共享空间、时间和本体记忆,形成完整的感知-认知-决策-行动闭环。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
RoboOS核心功能:
跨机器人协同: 支持松灵双臂、睿尔曼单/双臂、智元人形、宇树人形等多种机器人本体,实现多机器人状态同步与智能协作,打破信息孤岛。任务规划与执行: RoboBrain负责全局规划,小脑技能库确保精准执行,实现柔性与精密操作。动态任务管理: 支持多机器人任务队列的动态管理,具备优先级抢占和资源优化分配功能,确保复杂环境下的高效响应。系统可根据执行反馈动态调整策略,持续优化任务规划,提升鲁棒性。便捷部署: 支持大脑模型(如LLM/VLM)和小脑技能(如抓取、导航)的“即插即用”,并提供Profile模板机制,简化机器人能力建模与适配流程。端云协同: 支持端云一体化协同,指令响应延迟小于10ms,满足复杂动态任务的闭环控制需求。
RoboOS技术原理:
RoboOS基于“大脑-小脑”分层架构:具身大脑RoboBrain负责全局感知与决策;小脑技能库负责低延迟精准执行;跨机器人数据中枢实时共享信息,形成闭环。
 察言观数AskTable
察言观数AskTable
企业级AI数据表格智能体平台
 33 查看详情
33 查看详情 
RoboOS应用场景:
RoboOS广泛应用于:
工业自动化: 实现多机器人协同完成复杂生产任务,提升效率和质量。智慧物流: 优化仓储和配送流程,提高物流效率。智能制造: 提升制造过程的灵活性和适应性。服务机器人: 在餐厅、酒店等场景提供高效服务。科研: 为科研人员提供研究自主移动机器人和无人驾驶等技术的平台。
以上就是RoboOS— 智源研究院推出的首个跨本体具身大小脑协作框架的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/842614.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫