在led子系统中,硬件驱动层是关键的一部分,负责管理led设备的具体实现。本文将详细介绍led子系统硬件驱动层的实现流程及相关数据结构。
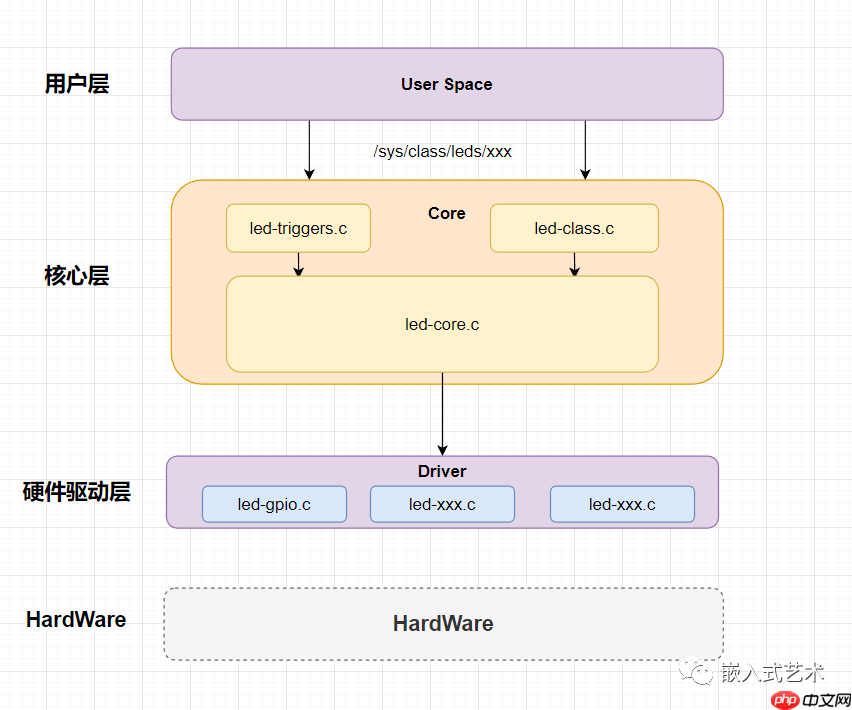 image-20230417084033734
image-20230417084033734
LED子系统的硬件驱动层文件主要位于kernel/drivers/leds/目录下,包含的主要函数有led-gpio.c和led-xxx.c。其中,led-gpio.c是通用的平台驱动程序,而led-xxx.c则是不同厂商提供的特定平台驱动程序。
1、gpio_led_probe函数分析
打开led-gpio.c文件,直接找到加载驱动的入口函数gpio_led_probe。
1.1 相关数据结构
1.1.1 gpio_led_platform_data
struct gpio_led_platform_data { int num_leds; const struct gpio_led *leds; #define GPIO_LED_NO_BLINK_LOW 0 /* No blink GPIO state low */ #define GPIO_LED_NO_BLINK_HIGH 1 /* No blink GPIO state high */ #define GPIO_LED_BLINK 2 /* Please, blink */ gpio_blink_set_t gpio_blink_set;};
结构体名称:gpio_led_platform_data
文件位置:include/linux/leds.h
主要作用:用于LED的平台数据,统一管理LED硬件设备。
1.1.2 gpio_leds_priv
struct gpio_leds_priv { int num_leds; struct gpio_led_data leds[];};
结构体名称:gpio_leds_priv
文件位置:drivers/leds/leds-gpio.c
 Writer
Writer
企业级AI内容创作工具
 176 查看详情
176 查看详情 
主要作用:LED驱动的私有数据类型,管理所有LED设备。
1.2 实现流程
static int gpio_led_probe(struct platform_device *pdev){ struct gpio_led_platform_data *pdata = dev_get_platdata(&pdev->dev); // 检索设备的平台数据 struct gpio_leds_priv *priv; int i, ret = 0; if (pdata && pdata->num_leds) { // 判断平台数据LED数量 priv = devm_kzalloc(&pdev->dev, sizeof_gpio_leds_priv(pdata->num_leds), GFP_KERNEL); if (!priv) return -ENOMEM; priv->num_leds = pdata->num_leds; for (i = 0; i num_leds; i++) { ret = create_gpio_led(&pdata->leds[i], &priv->leds[i], &pdev->dev, NULL, pdata->gpio_blink_set); if (ret < 0) return ret; } } else { priv = gpio_leds_create(pdev); if (IS_ERR(priv)) return PTR_ERR(priv); } platform_set_drvdata(pdev, priv); return 0;}
函数介绍:gpio_led_probe是LED驱动的入口函数,也是LED子系统中硬件设备与驱动程序匹配后执行的第一个函数。
实现思路:
使用dev_get_platdata检索设备的平台数据。如果平台数据中的LED数量大于零,则使用devm_kzalloc为其分配内存空间,并使用create_gpio_led进行初始化。如果平台数据不存在或LED数量为零,则使用gpio_leds_create创建LED。最后,设置驱动程序数据,并返回0表示操作成功。
数据结构:该函数主要涉及两个数据结构gpio_led_platform_data和gpio_leds_priv。
2、gpio_leds_create函数分析
2.1 相关数据结构
2.1.1 gpio_led
/* For the leds-gpio driver */struct gpio_led { const char *name; // LED名称 const char *default_trigger; // 默认触发类型 unsigned gpio; // GPIO编号 unsigned active_low : 1; // 低电平有效 unsigned retain_state_suspended : 1; unsigned panic_indicator : 1; unsigned default_state : 2; // 默认状态 unsigned retain_state_shutdown : 1; /* default_state should be one of LEDS_GPIO_DEFSTATE_(ON|OFF|KEEP) */ struct gpio_desc *gpiod; // GPIO Group};
结构体名称:gpio_led
文件位置:include/linux/leds.h
主要作用:描述LED的硬件信息,包括名称、GPIO编号、有效电平等。
2.1.2 gpio_led_data
struct gpio_led_data { struct led_classdev cdev; // LED Class struct gpio_desc *gpiod; // GPIO description u8 can_sleep; u8 blinking; // 闪烁 gpio_blink_set_t platform_gpio_blink_set; // 闪烁设置};
结构体名称:gpio_led_data
文件位置:drivers/leds/leds-gpio.c
主要作用:存储LED相关数据信息,主要包括led_classdev,用于注册设备节点信息。
2.2 实现流程
static struct gpio_leds_priv *gpio_leds_create(struct platform_device *pdev){ struct device *dev = &pdev->dev; struct fwnode_handle *child; struct gpio_leds_priv *priv; int count, ret; count = device_get_child_node_count(dev); // 获取子节点数量 if (!count) return ERR_PTR(-ENODEV); priv = devm_kzalloc(dev, sizeof_gpio_leds_priv(count), GFP_KERNEL); if (!priv) return ERR_PTR(-ENOMEM); device_for_each_child_node(dev, child) { struct gpio_led_data *led_dat = &priv->leds[priv->num_leds]; // 与gpio_leds_priv结构体关联 struct gpio_led led = {}; const char *state = NULL; struct device_node *np = to_of_node(child); ret = fwnode_property_read_string(child, "label", &led.name); // 读设备树属性,赋值gpio_led结构体 if (ret && IS_ENABLED(CONFIG_OF) && np) led.name = np->name; if (!led.name) { fwnode_handle_put(child); return ERR_PTR(-EINVAL); } led.gpiod = devm_fwnode_get_gpiod_from_child(dev, NULL, child, GPIOD_ASIS, led.name); if (IS_ERR(led.gpiod)) { fwnode_handle_put(child); return ERR_CAST(led.gpiod); } fwnode_property_read_string(child, "linux,default-trigger", &led.default_trigger); if (!fwnode_property_read_string(child, "default-state", &state)) { if (!strcmp(state, "keep")) led.default_state = LEDS_GPIO_DEFSTATE_KEEP; else if (!strcmp(state, "on")) led.default_state = LEDS_GPIO_DEFSTATE_ON; else led.default_state = LEDS_GPIO_DEFSTATE_OFF; } if (fwnode_property_present(child, "retain-state-suspended")) led.retain_state_suspended = 1; if (fwnode_property_present(child, "retain-state-shutdown")) led.retain_state_shutdown = 1; if (fwnode_property_present(child, "panic-indicator")) led.panic_indicator = 1; ret = create_gpio_led(&led, led_dat, dev, np, NULL); // 将gpio_led结构体、gpio_led_data关联起来 if (ret cdev.dev->of_node = np; priv->num_leds++; } return priv;}
函数介绍:gpio_leds_create主要用于创建LED设备。
实现思路:
使用device_get_child_node_count获取设备树中LED子节点的数量,并根据数量分配LED设备对应的内存空间。通过device_for_each_child_node遍历每个子节点,为每个子节点创建对应的LED设备。对于每个子节点,使用fwnode_property_read_string接口读取设备树中的相关属性信息,如label、linux,default-trigger等,并将这些信息赋值给gpio_led结构体。最后,调用create_gpio_led进行设备的创建。
3、create_gpio_led函数分析
3.1 相关数据结构
3.1.1 led_classdev
struct led_classdev { const char *name; enum led_brightness brightness; enum led_brightness max_brightness; int flags; /* Lower 16 bits reflect status */ #define LED_SUSPENDED BIT(0) #define LED_UNREGISTERING BIT(1) /* Upper 16 bits reflect control information */ #define LED_CORE_SUSPENDRESUME BIT(16) #define LED_SYSFS_DISABLE BIT(17) #define LED_DEV_CAP_FLASH BIT(18) #define LED_HW_PLUGGABLE BIT(19) #define LED_PANIC_INDICATOR BIT(20) #define LED_BRIGHT_HW_CHANGED BIT(21) #define LED_RETAIN_AT_SHUTDOWN BIT(22) /* set_brightness_work / blink_timer flags, atomic, private. */ unsigned long work_flags; #define LED_BLINK_SW 0 #define LED_BLINK_ONESHOT 1 #define LED_BLINK_ONESHOT_STOP 2 #define LED_BLINK_INVERT 3 #define LED_BLINK_BRIGHTNESS_CHANGE 4 #define LED_BLINK_DISABLE 5 /* Set LED brightness level * Must not sleep. Use brightness_set_blocking for drivers * that can sleep while setting brightness. */ void (*brightness_set)(struct led_classdev *led_cdev, enum led_brightness brightness); /* * Set LED brightness level immediately - it can block the caller for * the time required for accessing a LED device register. */ int (*brightness_set_blocking)(struct led_classdev *led_cdev, enum led_brightness brightness); /* Get LED brightness level */ enum led_brightness (*brightness_get)(struct led_classdev *led_cdev); /* * Activate hardware accelerated blink, delays are in milliseconds * and if both are zero then a sensible default should be chosen. * The call should adjust the timings in that case and if it can't * match the values specified exactly. * Deactivate blinking again when the brightness is set to LED_OFF * via the brightness_set() callback. */ int (*blink_set)(struct led_classdev *led_cdev, unsigned long *delay_on, unsigned long *delay_off); struct device *dev; const struct attribute_group **groups; struct list_head node; /* LED Device list */ const char *default_trigger; /* Trigger to use */ unsigned long blink_delay_on, blink_delay_off; struct timer_list blink_timer; int blink_brightness; int new_blink_brightness; void (*flash_resume)(struct led_classdev *led_cdev); struct work_struct set_brightness_work; int delayed_set_value; #ifdef CONFIG_LEDS_TRIGGERS /* Protects the trigger data below */ struct rw_semaphore trigger_lock; struct led_trigger *trigger; struct list_head trig_list; void *trigger_data; /* true if activated - deactivate routine uses it to do cleanup */ bool activated; #endif #ifdef CONFIG_LEDS_BRIGHTNESS_HW_CHANGED int brightness_hw_changed; struct kernfs_node *brightness_hw_changed_kn; #endif /* Ensures consistent access to the LED Flash Class device */ struct mutex led_access;};
结构体名称:led_classdev
文件位置:include/linux/leds.h
主要作用:该结构体包含多个功能,如:
brightness:当前亮度值max_brightness:最大亮度值LED闪烁功能控制:blink_timer、blink_brightness、new_blink_brightness等attribute_group:创建sysfs文件节点,提供用户访问接口
3.2 实现流程
static int create_gpio_led(const struct gpio_led *template, struct gpio_led_data *led_dat, struct device *parent, struct device_node *np, gpio_blink_set_t blink_set){ int ret, state; led_dat->gpiod = template->gpiod; if (!led_dat->gpiod) { /* * This is the legacy code path for platform code that * still uses GPIO numbers. Ultimately we would like to get * rid of this block completely. */ unsigned long flags = GPIOF_OUT_INIT_LOW; /* skip leds that aren't available */ if (!gpio_is_valid(template->gpio)) { // 判断是否gpio合法 dev_info(parent, "Skipping unavailable LED gpio %d (%s)n", template->gpio, template->name); return 0; } if (template->active_low) flags |= GPIOF_ACTIVE_LOW; ret = devm_gpio_request_one(parent, template->gpio, flags, template->name); if (ret gpiod = gpio_to_desc(template->gpio); // 获取gpio组 if (!led_dat->gpiod) return -EINVAL; } led_dat->cdev.name = template->name; // 赋值一些属性信息 led_dat->cdev.default_trigger = template->default_trigger; led_dat->can_sleep = gpiod_cansleep(led_dat->gpiod); if (!led_dat->can_sleep) led_dat->cdev.brightness_set = gpio_led_set; // 设置LED else led_dat->cdev.brightness_set_blocking = gpio_led_set_blocking; led_dat->blinking = 0; if (blink_set) { led_dat->platform_gpio_blink_set = blink_set; led_dat->cdev.blink_set = gpio_blink_set; } if (template->default_state == LEDS_GPIO_DEFSTATE_KEEP) { state = gpiod_get_value_cansleep(led_dat->gpiod); if (state default_state == LEDS_GPIO_DEFSTATE_ON); } led_dat->cdev.brightness = state ? LED_FULL : LED_OFF; if (!template->retain_state_suspended) led_dat->cdev.flags |= LED_CORE_SUSPENDRESUME; if (template->panic_indicator) led_dat->cdev.flags |= LED_PANIC_INDICATOR; if (template->retain_state_shutdown) led_dat->cdev.flags |= LED_RETAIN_AT_SHUTDOWN; ret = gpiod_direction_output(led_dat->gpiod, state); if (ret cdev); // 将LED设备注册到子系统中}
函数介绍:create_gpio_led是创建LED设备的核心函数。
实现思路:
通过gpio_is_valid接口判断GPIO是否合法。将从设备树解析出来的信息填充到gpio_led_data字段中,并初始化部分字段,如led_classdev、gpio_desc等。填充回调函数,实现相应的动作,如gpio_led_set、gpio_led_set_blocking、gpio_blink_set等。最后调用devm_of_led_classdev_register接口,将LED设备注册到LED框架中。
4、回调函数分析
4.1 gpio_blink_set
static int gpio_blink_set(struct led_classdev *led_cdev, unsigned long *delay_on, unsigned long *delay_off){ struct gpio_led_data *led_dat = cdev_to_gpio_led_data(led_cdev); led_dat->blinking = 1; return led_dat->platform_gpio_blink_set(led_dat->gpiod, GPIO_LED_BLINK, delay_on, delay_off);}
函数介绍:gpio_blink_set主要用于设置闪烁的时延。
4.2 gpio_led_set 和 gpio_led_set_blocking
static inline struct gpio_led_data * cdev_to_gpio_led_data(struct led_classdev *led_cdev){ return container_of(led_cdev, struct gpio_led_data, cdev);}static void gpio_led_set(struct led_classdev *led_cdev, enum led_brightness value){ struct gpio_led_data *led_dat = cdev_to_gpio_led_data(led_cdev); int level; if (value == LED_OFF) level = 0; else level = 1; if (led_dat->blinking) { led_dat->platform_gpio_blink_set(led_dat->gpiod, level, NULL, NULL); led_dat->blinking = 0; } else { if (led_dat->can_sleep) gpiod_set_value_cansleep(led_dat->gpiod, level); else gpiod_set_value(led_dat->gpiod, level); }}static int gpio_led_set_blocking(struct led_classdev *led_cdev, enum led_brightness value){ gpio_led_set(led_cdev, value); return 0;}
函数介绍:gpio_led_set 和 gpio_led_set_blocking主要用于设置亮度,区别在于gpio_led_set不可睡眠,而gpio_led_set_blocking可休眠。
5、总结
以上我们了解了硬件驱动层的实现流程以及相关数据结构,总结如下:
5.1 数据结构之间的关系如下
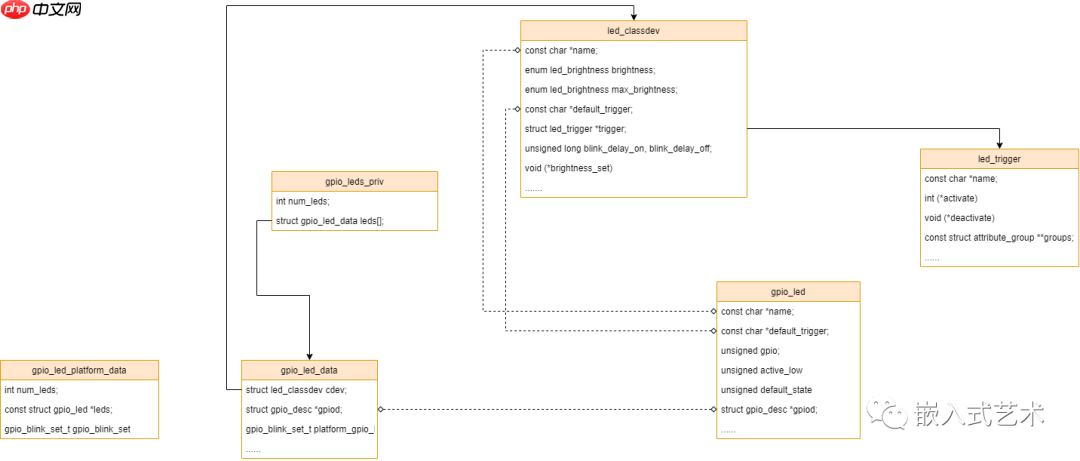 LED子系统-LED数据结构.drawio
LED子系统-LED数据结构.drawio
5.2 函数实现流程如下
gpio_led_probe(drivers/leds/leds-gpio.c) |--> gpio_leds_create |--> create_gpio_led // 创建LED设备 |--> devm_of_led_classdev_register
5.3 主要作用如下
从设备树获取LED相关属性信息,赋值给gpio_led结构体。将gpio_led、gpio_leds_priv、led_classdev等数据结构关联起来。将LED设备注册进入LED子系统中。
以上就是Linux驱动开发新手必读 | 二、LED子系统——硬件驱动层的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/941374.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫