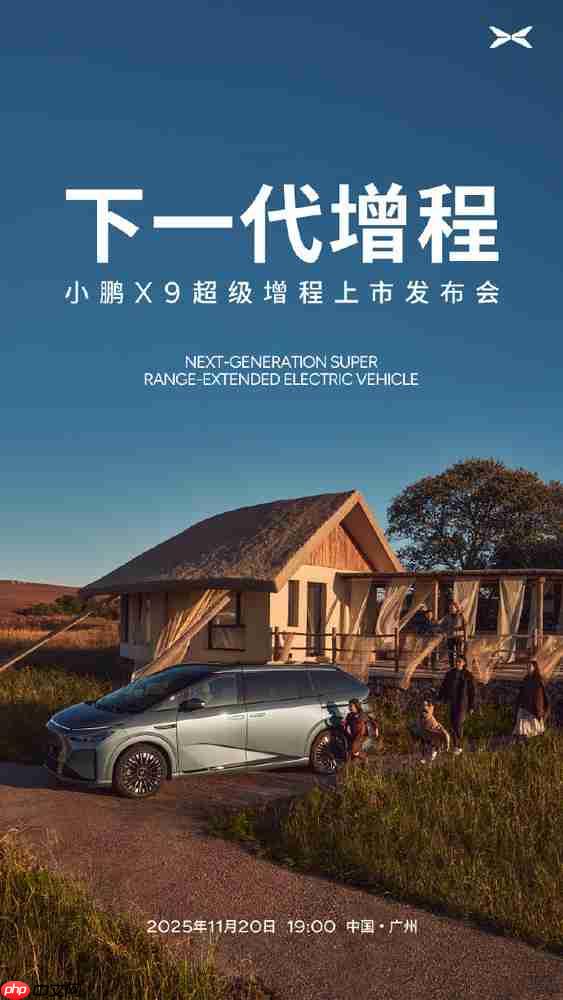
11月17日,小鹏汽车官方发布消息,宣布小鹏x9超级增程版将于11月20日晚7点正式上市。此前,该车型已于11月6日开启预售,提供max版与ultra版两款配置,预售价分别为35万元和37万元。新车综合续航高达1602公里,搭载800v高压平台及5c超充技术,充电效率大幅提升。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
 小鹏X9超级增程
小鹏X9超级增程
据悉,小鹏X9超级增程版车身尺寸为长5316mm、宽1988mm、高1785mm,轴距达3160mm,定位为大型七座MPV,整备质量为2750kg。外观设计延续纯电版本风格,整体线条硬朗分明,配备主动式进气格栅,有助于降低风阻并提升续航表现。车身采用前后一体化压铸工艺,最高强度钢材达到2000Mpa,整车扭转刚度高达46000N·m/deg,安全性与结构稳定性进一步增强。
 Reclaim.ai
Reclaim.ai
为优先事项创建完美的时间表
 90 查看详情
90 查看详情 
内饰部分,小鹏X9超级增程配备17.3英寸中控屏与10.25英寸全液晶仪表屏,搭载高通骁龙8295P车载芯片,确保智能座舱流畅运行。车内布局与纯电版保持一致,方向盘经过全新设计,两侧集成多功能按键,并提供三种内饰配色选择:气宇灰、月影咖以及云间玫棕,满足不同用户的审美需求。
在动力系统方面,新车搭载由1.5T增程器(最大功率110kW)与电机组成的增程系统,其中电机最大输出功率为210kW,增程器热效率高达43.06%。CLTC工况下纯电续航可达452公里,综合续航里程达1602公里,百公里综合油耗仅为6.4L。支持5C超快充技术,电量从10%充至80%仅需11.7分钟。此外,车辆还具备6kW的V2V/V2L外放电功能,可满足户外用电等多种场景需求。
以上就是小鹏X9超级增程官宣11月20日上市 续航达1602km的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/996512.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫