
论文题目:《基于改进的模型预测控制的自动驾驶车辆在不确定环境下的轨迹规划方法》
发表期刊:IEEE Transactions on Intelligent Transportation Systems
发布日期:2023年04月
以下是我自己的論文閱讀筆記,主要是我自己覺得重點的部分,非全文翻譯,該文章接著前一篇文章,梳理了本論文的實驗驗證部分。前一篇文章如下:以下是我自己的論文閱讀筆記,主要是我自己覺得重點的部分,非全文翻譯,該文章接著前一篇文章,梳理了本論文的實驗驗證部分。前一篇文章如下:
fhwim:一种针对不确定环境下自动驾驶车辆的基于改进的模型预测控制的轨迹规划方法
https://zhuanlan.zhihu.com/p/658708080
1. 仿真验证
(1)仿真环境
联合仿真工具包括Prescan、PyCharm、Matlab/Simulink,其中Prescan用于搭建仿真的交通场景,PyCharm(有神经网络还是用pytorch轻松)用来写融合预测模块,Matlab/Simulink(有MPC工具箱)用来搭建轨迹规划模块以及实现车辆控制,整体工具的选择思路还是比较自然合理。控制这一部分横向控制用的是LQR,纵向控制用的是PID,也是比较常用的控制方法。融合预测模块中的LSTM encoder-decoder采用的是开源代码,作者说来自参考文献[31]Comprehensive Review of Neural Network-Based Prediction Intervals and New Advances这篇文章,但是我看这篇文章发表于2011年,有点久远(2011就有LSTM encoder-decode呢?),不知道作者有没有在此基础上改代码。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
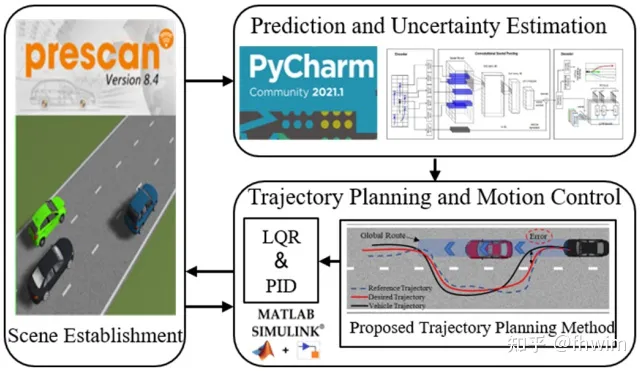
图1 仿真环境搭建
(2)MRPI集的求取



图2 子系统的MRPI集
(3)case1:静态避障场景
静态避障场景指一辆障碍车静止不动,轨迹规划结果如下图:
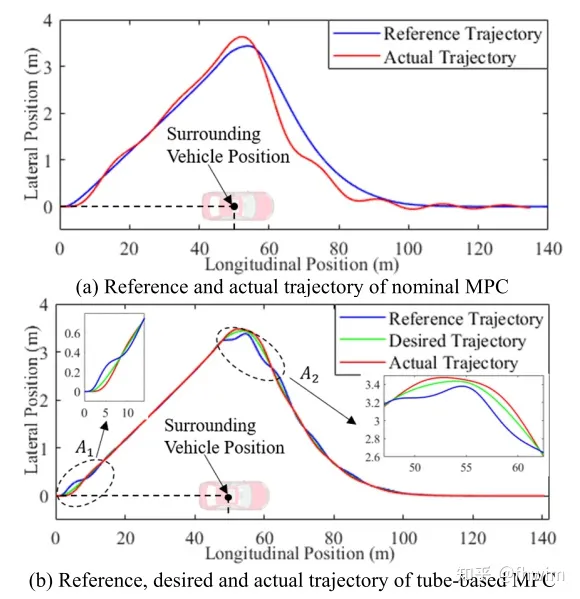
对比图3中一般的MPC方法和基于管道的MPC方法
这里我怀疑他图例有问题,按照前文,最终参考轨迹reference trajectory由期望轨迹desired trajectory 和调整轨迹adjustment trajectory相加得到,同时他在分析结果的时候也说tube-based MPC在图3(b)区域 和 的误差较大,由于adjustment trajectory减小了误差,那应该是把图3(b)的desired trajectory和reference trajectory两个图例交换一下才符合他这个文章的逻辑,也就是绿线是最终的reference trajectory,蓝线是中间结果desired trajectory。包括下面的速度曲线、横纵向误差曲线也是,不过大概懂作者意思就行,tube-based MPC中绿色曲线是最终的结果,蓝色曲线是未加adjustment trajectory的结果。

图4展示了一般MPC方法和基于管道的MPC方法在速度变化方面的对比

图5 横向位置对比
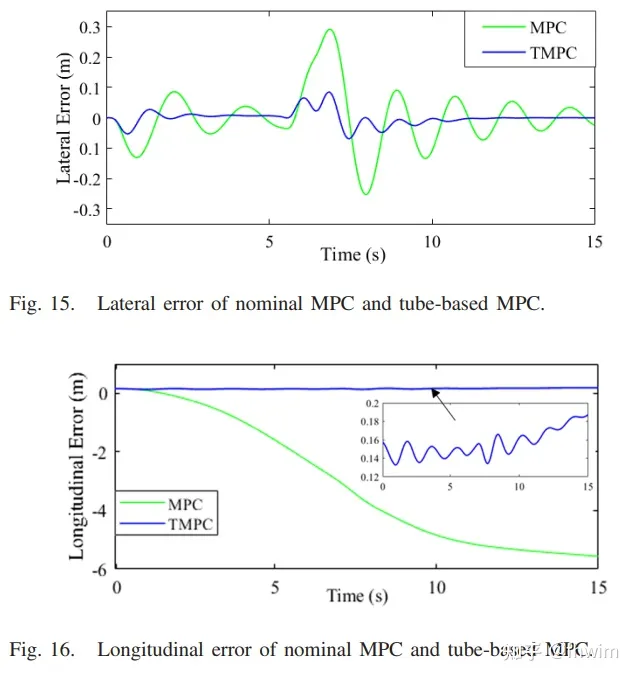
需要进行改写的内容是:比较横纵向误差的图6
作者还对方向盘角度变化的平稳程度进行了比较,这里就不再详述,总之有所改善。同时,作者提出了调整轨迹效果良好的理论依据,加入后,轨迹误差始终在MRPI集合内,也就是说基于管道的模型预测控制(tube-based MPC)的跟踪偏差一直保持在MRPI集合内,而一般的模型预测控制(MPC)在不确定环境下没有一个边界,可能会很大
(4)case2:动态避障场景
与之前的场景相比,现在障碍车开始运动了。对于整体轨迹、速度变化、横纵向误差以及方向盘变化的平稳性等方面,不再赘述。在这里,只展示一个整体轨迹的图示
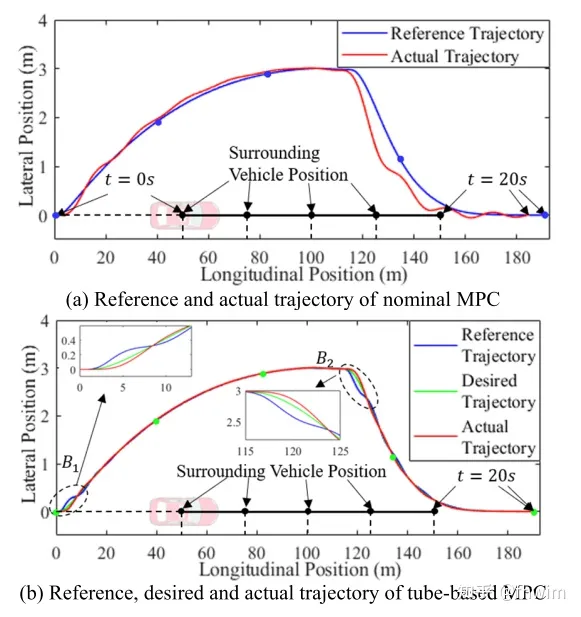
图7 一般MPC方法和tube-based MPC方法的整体轨迹对比
(5)case3:真实驾驶场景
在这里,作者选择使用NGSIM数据集来验证自己的方法。首先,作者验证了融合预测方法。NGSIM数据集包含了车辆的轨迹数据,作者将其拆分为历史轨迹和未来轨迹,并构建了一个训练集,以便LSTM编码器-解码器进行学习。作者选择了10000条轨迹,其中7500条用作训练集,2500条用作验证集。优化器采用了Adam,并将学习率设置为0.01。预测效果如下图所示
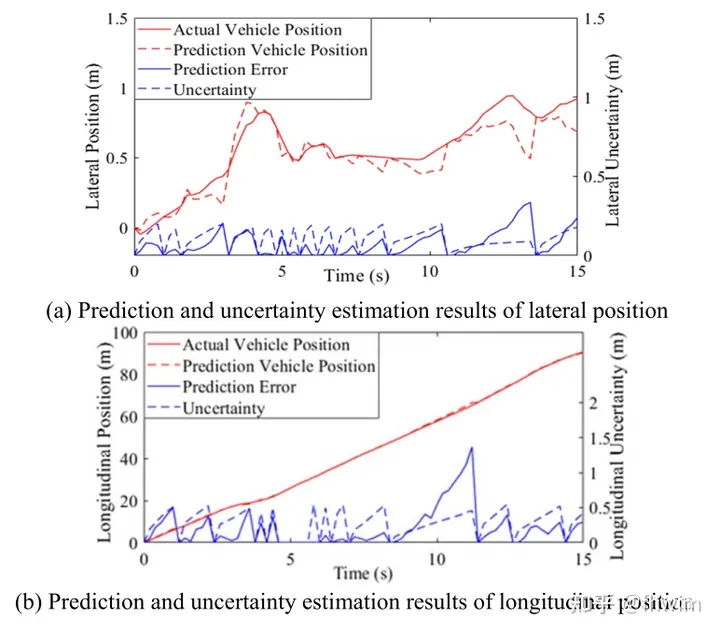
图8 横纵向上轨迹预测和不确定性的结果
作者在这篇文章中并没有使用轨迹预测领域常用的指标,比如ADE、FDE等。我认为这样的做法缺乏说服力,但也可以理解本文的重点在于基于基于tube-based MPC的轨迹规划
在验证完轨迹预测后又进行了轨迹规划进一步验证轨迹预测模块的作用,这里是比较了三种情况:
(a)在我已经知道障碍车未来真实轨迹的情况下,我去进行轨迹规划,这个作为对照组
 ImagetoCartoon
ImagetoCartoon
一款在线AI漫画家,可以将人脸转换成卡通或动漫风格的图像。
 106 查看详情
106 查看详情 
在我不知道障碍车未来轨迹的情况下,我先进行轨迹预测(但是不计算不确定性),然后再进行轨迹规划
(c)在我不知道障碍车未来轨迹的情况下,我先进行轨迹预测(计算不确定性),再进行轨迹规划
图9显示了(a)、(b)和(c)的结果,分别对应True Position,Prediction Results和Proposed Method
Proposed Method 也就是本文的方法得出的结果,可以看到Proposed Method更接近True Position,说明这个融合预测方法(尤其是不确定性的计算)是有作用的。
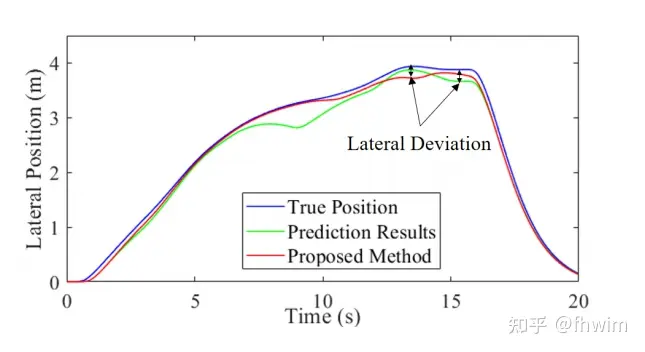
图9 三种方法对比验证轨迹预测模块
这里可以发现case1和case2验证的是轨迹规划部分,一般的模型预测控制(MPC)和基于管道的MPC前面的轨迹预测部分是一样的,这样比较可以说明基于管道的MPC的作用。case3则是验证轨迹预测模块,可以看到进行了两类验证。第一类是直接比较预测轨迹和真实轨迹,第二类是先已知未来轨迹/预测未来轨迹(不计算不确定性)/预测未来轨迹(计算不确定性),然后再进行轨迹规划。以真实位置为标准,对比有不确定性计算的轨迹预测方法和没有不确定性计算的轨迹预测方法的效果。对这两个模块的验证思路还是很清晰的
2. 实车实验验证
实验所用车辆如下图所示:

需要重新写作的内容是:实验中使用的车辆的图片10
作者还提供了实验车辆的参数以及实验中使用的电脑和传感器的参数:
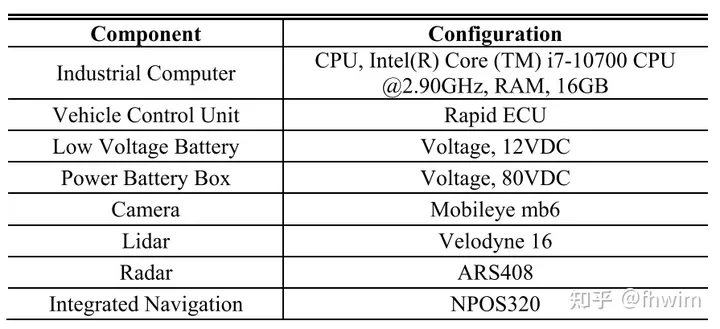
需要重写的内容是:图11 电脑和传感器的参数
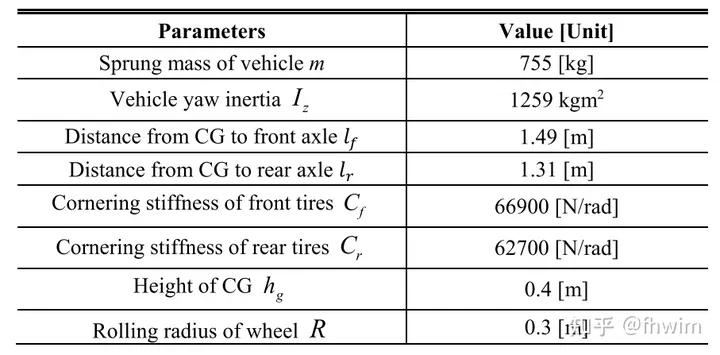
需要重新写的内容是:实验车辆的参数,图12
为了安全着想,作者设置的实验场景和仿真实验case1一样,都是一个静态避障场景,还是比较整体轨迹、速度变化、横纵向误差、方向盘变化平稳性这些东西,不再赘述。
3. 阅读总结
首先,论文的思路是关于带有不确定性计算的轨迹预测模块和基于tube-based MPC的轨迹规划模块。其中,轨迹规划模块是主要内容。我对这个模块化的形式感到很满意,因为它将轨迹预测真正应用到了轨迹规划上。预测的输出作为规划的输入,而规划模块仅仅确定一个安全阈值给预测模块,两个模块的耦合性较弱。换句话说,预测模块可以用其他方法替代,只要能提供预测障碍车轨迹和不确定性的结果即可。未来,可以考虑使用更高级的神经网络来直接预测轨迹和不确定性。整体而言,这个融合预测算法的流程有些复杂,但我认为论文的思路很好。仿真和实车试验的思路和工作量也令人满意
其次是文章阅读时发现的一些低级的错误。比如在LSTM encoder-decoder那一部分,LSTM输出的是未来 步的轨迹点,公式里写的也是,但是文字里这写成了 。

图13 LSTM encoder-decoder部分的一些错误
然后是在仿真实验部分,计算MRPI Set时说system(21)也就是 error system分成了子系统(32)和(34),但是实际上是子系统(30)和(32),这些小错误不影响整体方法但是也会影响读者的阅读体验。

图14 仿真实验部分MRPI Set原文
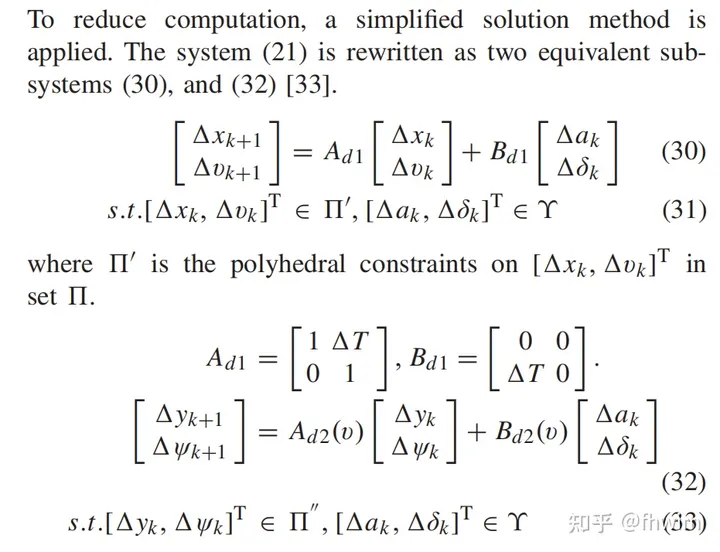
图15中的错误系统被分为子系统(30)和(32)

原文链接:https://mp.weixin.qq.com/s/0DymvaPmiCc_tf3pUArRiA
以上就是改进自动驾驶在不确定环境下的轨迹规划方法的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/1049848.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 






















