
自动驾驶
-
如何搭建C++自动驾驶环境 Apollo平台配置
搭建C++自动驾驶环境需先配置Ubuntu系统、Docker及NVIDIA驱动,再克隆Apollo代码并构建Docker镜像,进入容器后用bazel编译,启动Dreamview可视化界面,选择地图与模块运行Demo;常见问题如编译失败可清理缓存或更新依赖,自定义车辆模型和地图需掌握URDF与prot…
-
如何配置C++的自动驾驶规划环境 Apollo规划模块二次开发


为什么apollo规划模块的二次开发需要特定的环境配置?apollo使用docker和bazel是为了处理复杂的依赖关系、确保构建一致性、支持gpu加速以及提升团队协作效率。2. 在apollo环境中进行规划模块二次开发的关键步骤包括:准备宿主机环境、克隆apollo仓库、进入docker环境、编译…
-
自动驾驶实时系统:确定性内存分配器开发指南



自动驾驶实时系统对确定性内存分配器的需求,是为了确保内存操作在可预测时间内完成,从而保障系统的稳定与安全。1. 预分配和内存池通过预先分配固定大小的内存块,实现o(1)时间复杂度的快速分配与释放,但可能导致内存浪费;2. bump allocator使用移动指针的方式实现极快的分配,但通常不支持单独…
-
如何在C++中进行自动驾驶和智能导航开发?
如何在C++中进行自动驾驶和智能导航开发? 自动驾驶和智能导航是当今科技发展的热门领域之一。随着计算机硬件技术的快速发展和算法的不断完善,C++语言在自动驾驶和智能导航领域的应用越来越广泛。本文将介绍如何在C++中进行自动驾驶和智能导航的开发,并提供代码示例。 传感器数据获取与处理 自动驾驶和智能导…
-
如何实现C++中的自动驾驶和智能交通系统?
如何实现C++中的自动驾驶和智能交通系统? 自动驾驶和智能交通系统是目前人工智能领域的热门话题,它们的应用领域涉及到交通运输、安全防护和城市规划等多个方面。本文将探讨如何使用C++编程语言实现自动驾驶和智能交通系统,并提供相关的代码示例。 了解自动驾驶和智能交通系统基本原理自动驾驶系统是指通过计算机…
-
无需电池即可实现「自动驾驶」,华盛顿大学开发出无限续航的机器人


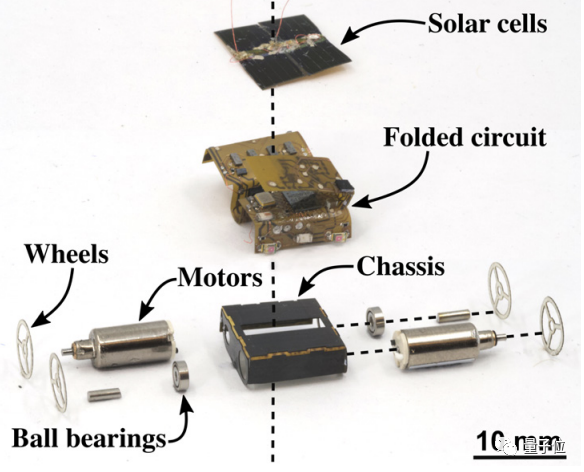
不装电池,也能自动驾驶的“车”出现了。 甚至还会自动收集能量持续运行,完全没有里程焦虑(手动狗头)。 ☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜ 不错,这么一个小%ignore_a_1%,其实靠的是光和无线电波供能。其名MilliMobi…
-
BEV下的Radar-Camera 融合跨数据集实验研究

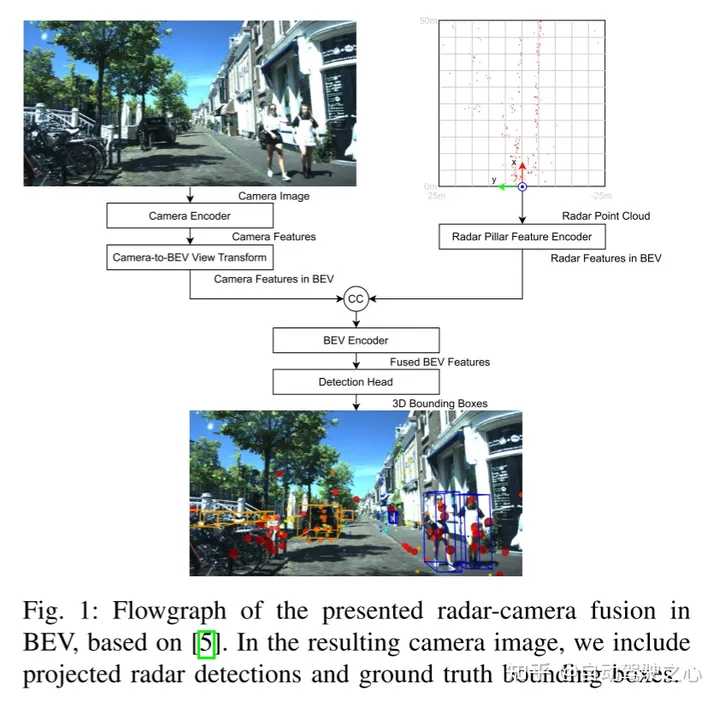
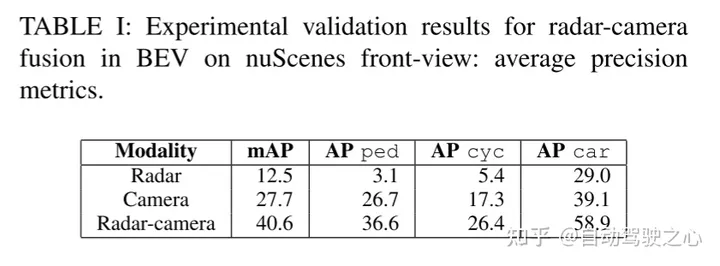
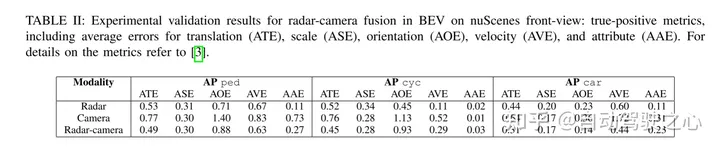
原标题:cross-dataset experimental study of radar-camera fusion in bird’s-eye view论文链接:https://arxiv.org/pdf/2309.15465.pdf作者单位:opel automobile gmbh rhein…
-
遥遥领先!BEVHeight++:针对路侧视觉3D目标检测新方案!



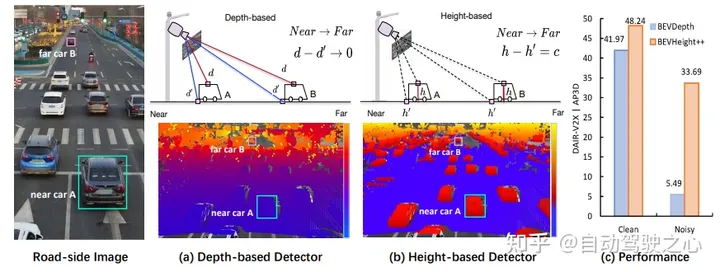
回归到地面的高度,以实现距离不可知的公式,从而简化仅相机感知方法的优化过程。在路侧camera的3d检测基准上,方法大大超过了以前所有以视觉为中心的方法。它比bevdepth产生了+1.9%的nds和+1.1%的map的显著改善。在nuscenes测试集上,方法取得了实质性的进步,nds和map分别…
-
改进自动驾驶在不确定环境下的轨迹规划方法
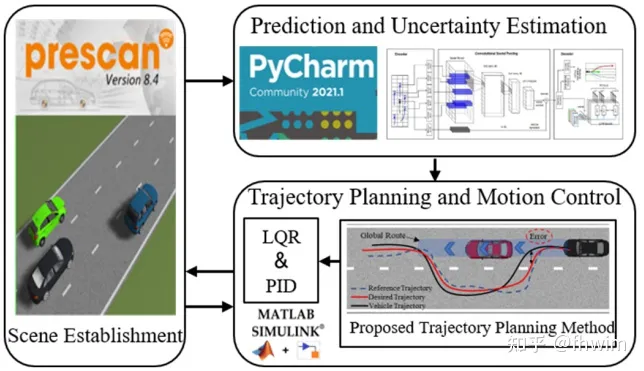
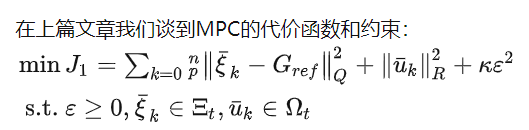


论文题目:《基于改进的模型预测控制的自动驾驶车辆在不确定环境下的轨迹规划方法》 发表期刊:IEEE Transactions on Intelligent Transportation Systems 发布日期:2023年04月 以下是我自己的論文閱讀筆記,主要是我自己覺得重點的部分,非全文翻譯,該…
-
LeCun对自动驾驶独角兽的造假行为深感失望



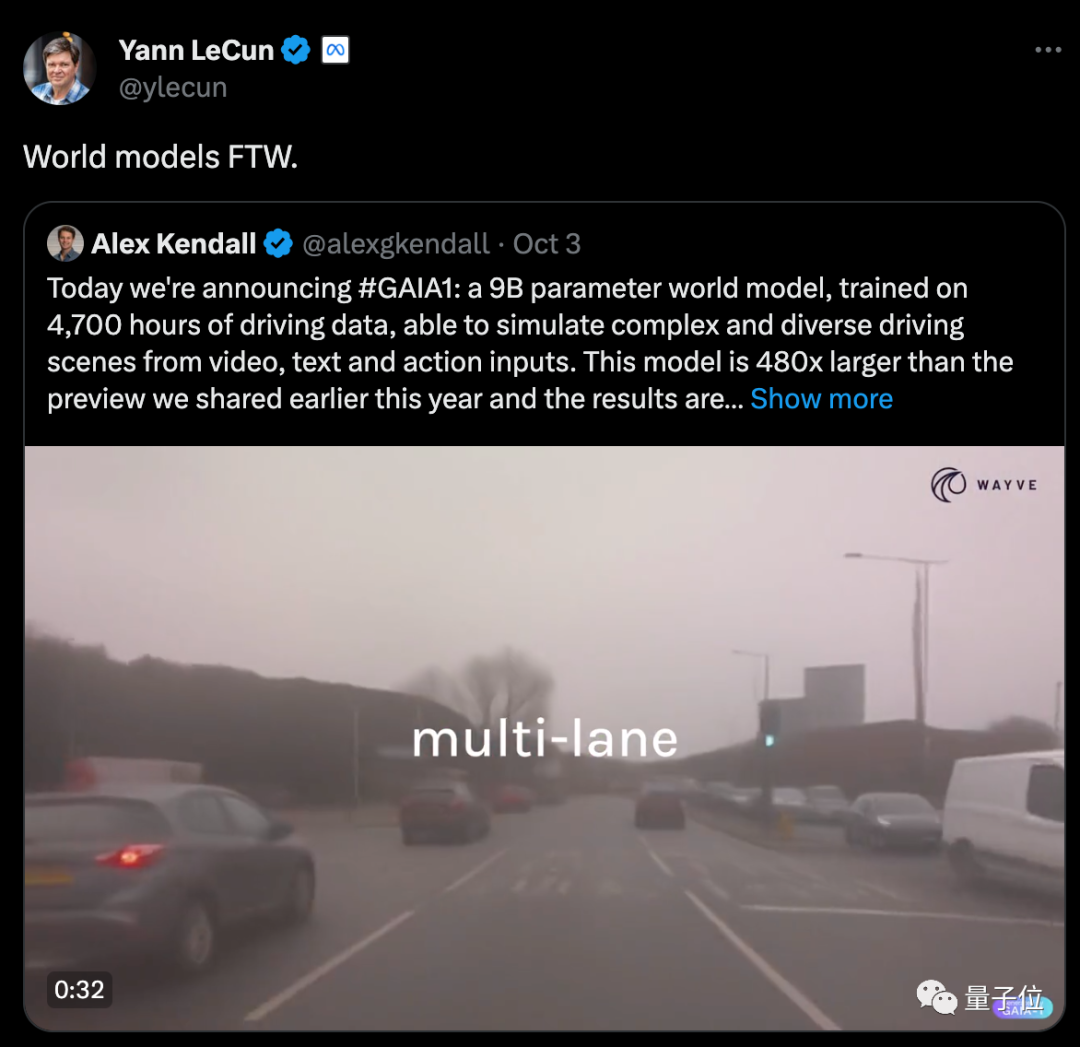
你以为这是一个普通的自动驾驶视频吗? ☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜ 图片 这个内容需要重新写成中文,而不改变原来的意思 没有一帧是“真的”。 图片 不同路况、各种天气,20多种情况都能模拟,效果以假乱真。 图片 世界模型再次…



