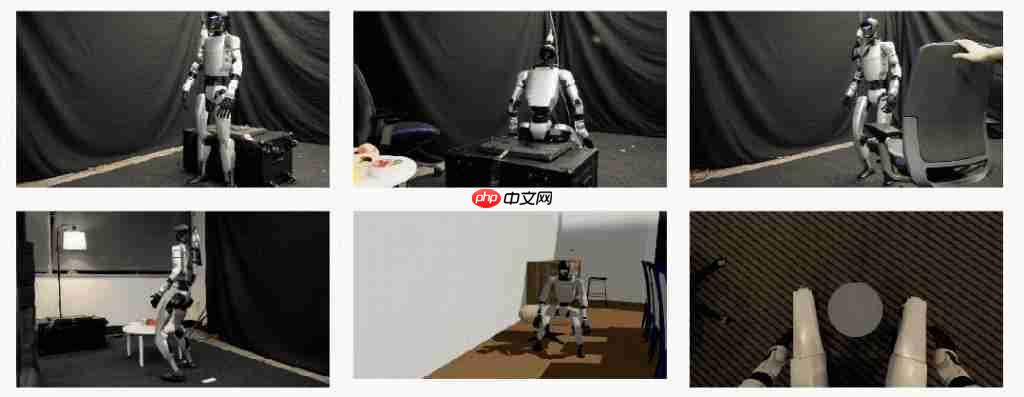
不用提前熟悉环境,一声令下,就能让宇树机器人坐在椅子上、桌子上、箱子上!

还能直接解锁 ” 跨过箱子 “、” 敲门 ” 等任务 ~

这是来自 UC 伯克利、卡内基梅隆大学等团队的最新研究成果LeVERB 框架——
基于模拟数据训练实现零样本部署,让人形机器人通过感知新环境,理解语言指令就能直接完成全身动作。
传统人形机器人要么 ” 能看懂指令却动不了 “(缺乏全身控制能力),要么 ” 只能机械执行动作却读不懂环境 “(依赖人工预设动作库)。
LeVERB 首次打通了视觉语义理解与物理运动两者之间的断层,让机器人能像人类一样从 ” 想 ” 到 ” 做 “,自动感知环境,直接遵循指令完成动作。
上面展示的 ” 坐下 ” 动作就是通过 ” 相机感知环境 +’ 坐在 [ 椅子 / 盒子 / 桌子 ] 上 ‘ 指令 ” 完成的:
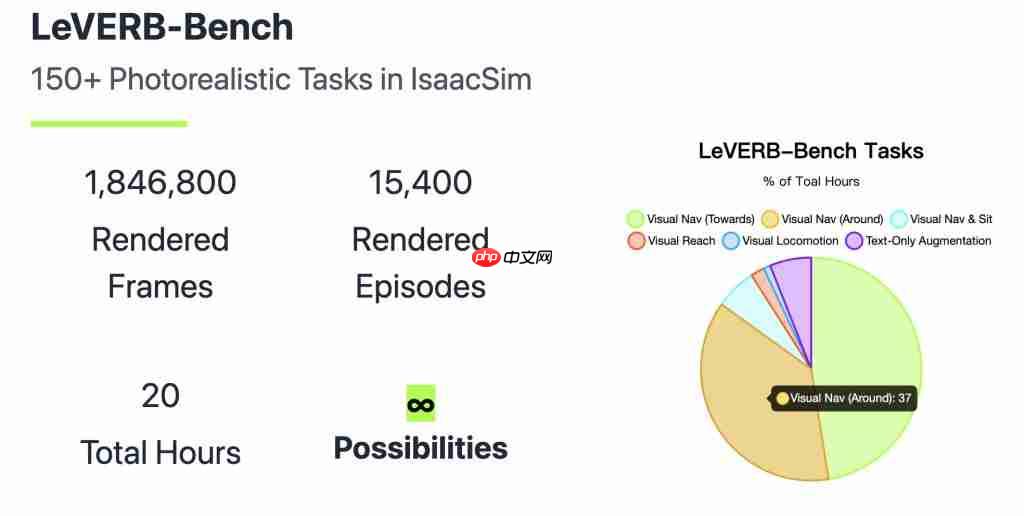
团队还推出了配套基准:LeVERB-Bench。
这是首个面向人形机器人 WBC(全身控制)的 ” 仿真到真实 ” 视觉 – 语言闭环基准,包含 10 类超 150 个任务。
团队将该框架部署在宇树 G1 机器人上进行基准测试,结果显示:
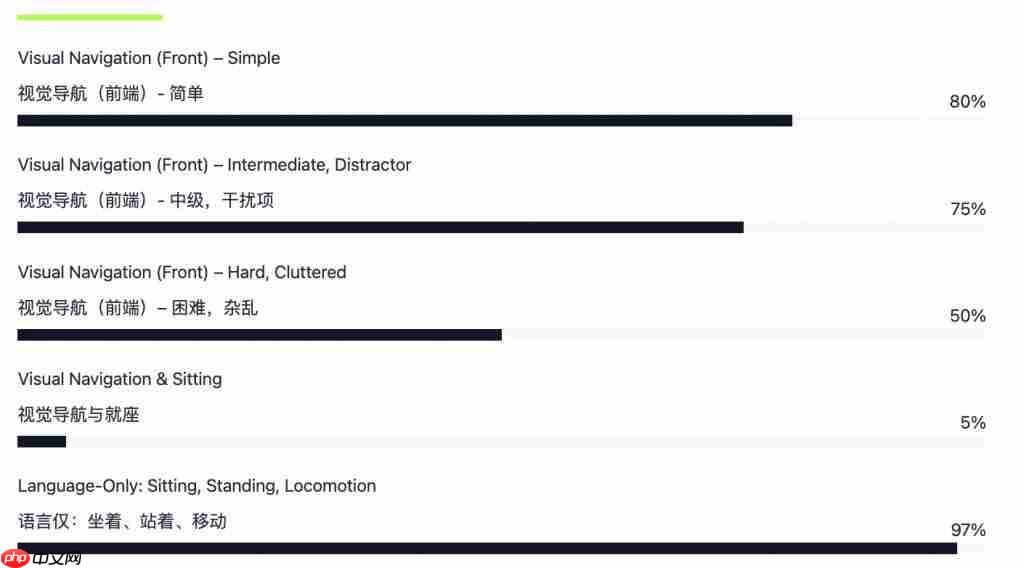
在简单视觉导航任务中零样本成功率达 80%,整体任务成功率58.5%,比朴素分层 VLA(视觉 – 语言 – 动作)方案的性能强 7.8 倍。
目前,LeVERB-Bench 数据集已在 LeRobot 格式中开源,项目的完整代码也即将发布。
双层系统实现从 ” 想 ” 到 ” 做 ” 的全身动作
多数视觉 – 语言 – 动作(VLA)模型在控制机器人时,依赖手工设计的底层动作 ” 词汇 “(如末端执行器姿势、根部速度等)。
这使得它们只能处理准静态任务,无法应对人形机器人全身控制(WBC)所需的灵活全身动作。
简单来说,以前的机器人要么高层直接控制细节(就像大脑同时管走路和思考,效率低),要么底层不懂语义(就像四肢只听简单命令,复杂任务做不了)。
而人形机器人是高维非线性动态系统,需要高频控制与低频规划结合,传统方法缺乏对视觉和语言语义的有效整合。
于是,团队提出将高层的视觉 – 语言指令压缩映射为一个动作向量,也就是一个抽象指令,这种指令能够被底层的动作模块识别并执行。
在 LeVERB 框架中,这个抽象指令被称为” 潜在动作词汇 “。
LeVERB 框架由分层双系统组成,这两层系统以 ” 潜在动作词汇 ” 作为接口。
该方法的最终目标是使两层的 ” 潜在动作词汇 ” 保持一致,让高层专注 ” 理解任务 “,底层专注 ” 做好动作 “,各取所长。
LeVERB 框架
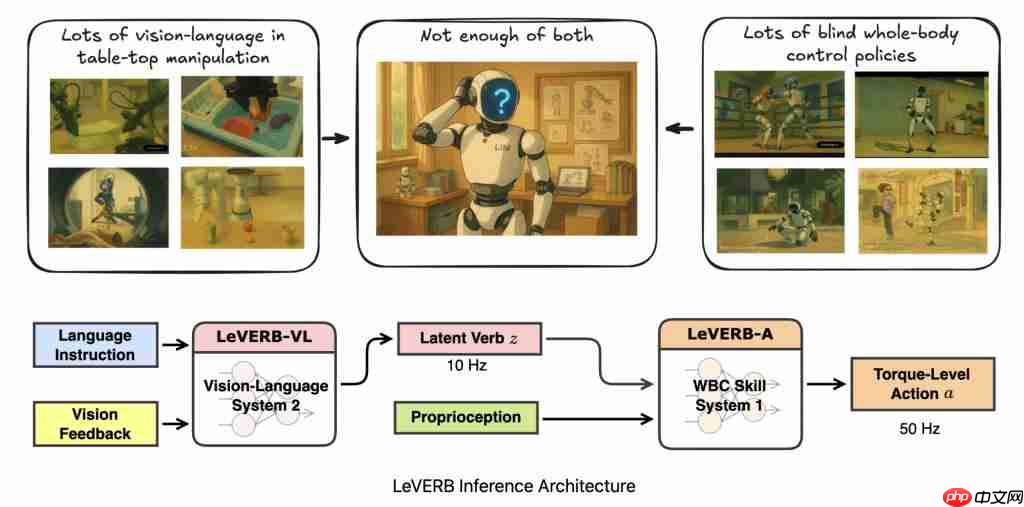
高层LeVERB-VL(想):一个基于 Transformer 的 102.6M 视觉语言主干,将语言指令和视觉上下文转换为潜在动词,运行频率 10Hz。
LeVERB-VL 负责理解 ” 看到的东西 ” 和 ” 听到的话 “。比如看到 ” 去坐蓝色椅子 “,它会先分析 ” 蓝色椅子在哪 “” 怎么过去 “,但不直接控制动作细节,而是把想法转化成一种 ” 抽象指令 “。
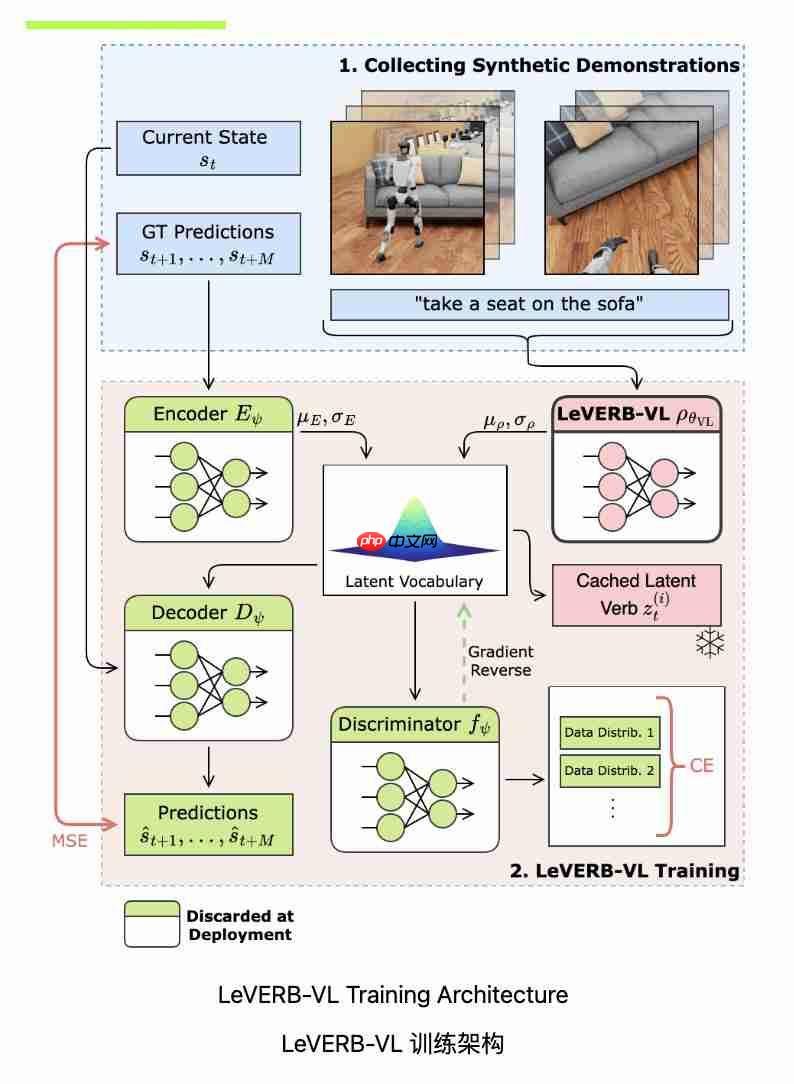
它通过 VLA 先验模块、运动学编码器、残差潜在空间、运动学解码器和判别器等组件,将视觉和语言输入映射到平滑规则的潜在词汇空间,为运动控制生成潜在动作计划。
训练时,通过轨迹重建、分布对齐和对抗分类三部分优化模型,同时采用数据混合策略增强数据多样性,并对超参数进行精细设置,以实现对视觉 – 语言信息的高效处理和准确决策 。
底层LeVERB-A(做):一个基于 Transformer 的 1.1M 全身动作专家,利用强化学习训练的 WBC 策略,接收高层的潜在动作指令,将潜在动词解码为动力学级的人形动作输出,运行频率 50Hz。
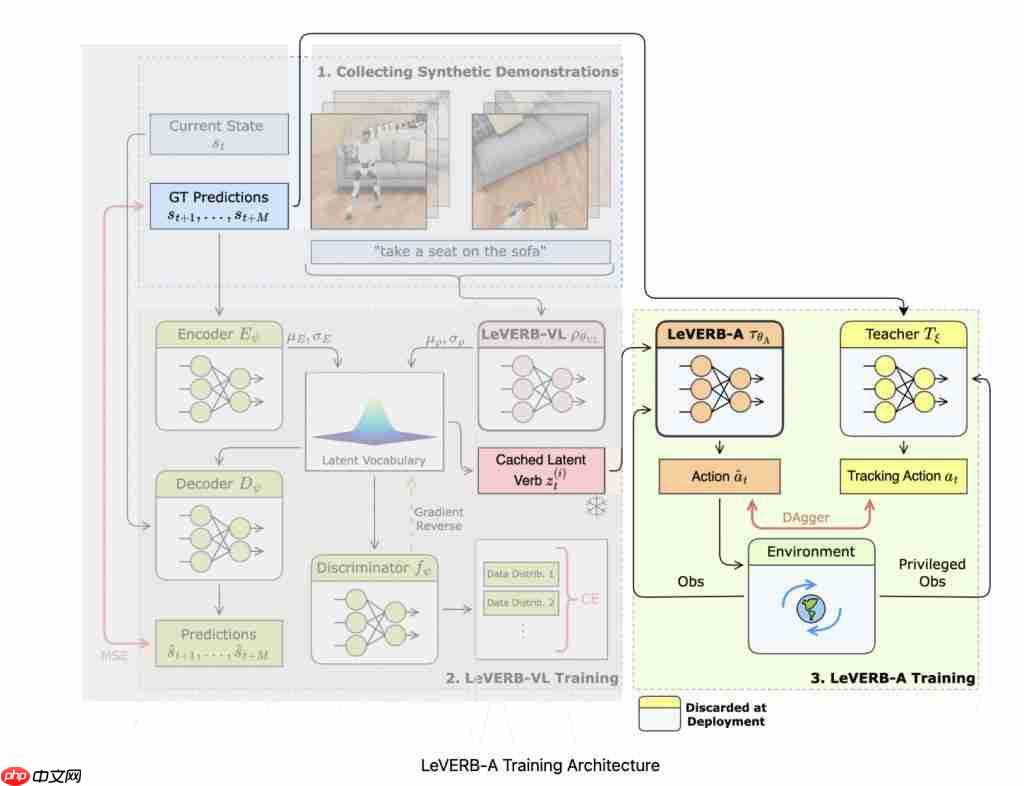
这部分作用是将 LeVERB-VL 生成的潜在指令转化为机器人可执行的动力学级动作。
训练时,先通过近端策略优化算法训练与视觉 – 语言无关的教师策略,再使用 DAgger 算法和 Huber 损失函数将教师策略的动作蒸馏到以潜在命令为条件的学生策略(即 LeVERB-A)中。
运行时,LeVERB-A 接收本体感受信息和潜在向量,采用 Transformer 架构输出经重新参数化的扭矩级关节位置动作指令,并在机器人板载 CPU 上用 C++ 实现实时推理,完成人形机器人的全身控制 。
LeVERB-Bench
无法衡量就无法展开下一步工作,团队还专门提出了一个人形机器人视觉 – 语言全身控制(WBC)任务的配套基准 LeVERB-Bench。
在人形机器人 WBC 领域,用于训练 VLA 模型的演示数据稀缺。现有基准存在诸多问题,如仅关注 locomotion、在状态空间中无视觉、渲染不真实导致仿真与现实差距大等,无法满足研究需求。
LeVERB-Bench 在仿真中重放重定向的动作捕捉(MoCap)运动,收集逼真的轨迹数据。这种方式无需在数据收集时进行可靠的动态控制,运动学姿势能提供任务级语义,还支持使用互联网视频等来源的重定向人形数据。
采用 IsaacSim 中的光线追踪渲染技术,能更准确地模拟场景光照和阴影,减轻以往合成数据中因光照不真实导致的仿真与现实差距问题。
通过程序生成管道,对每个轨迹进行缩放和随机化处理,随机化场景背景、物体属性、任务设置、相机视图,并对部分演示进行镜像,以确保数据的多样性和语义丰富性。
手动或使用 VLM 为数据标注以自我为中心的文本命令。同时,利用 VLM 为仅包含运动的对标注文本指令,增加仅语言数据,扩大数据覆盖范围。
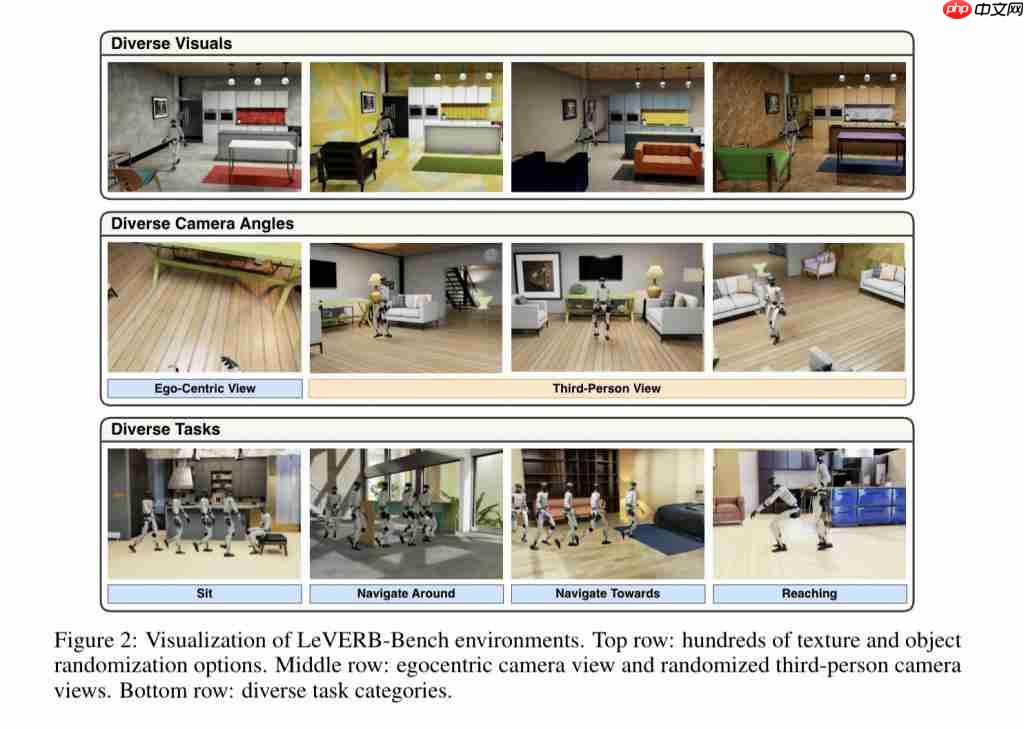
LeVERB-Bench 包含多种任务类别,如导航(Navigation)、走向目标(Towards)、绕物体移动(Around)、移动(Locomotion)、坐下(Sitting)、伸手够物(Reaching)等。
从视觉 – 语言任务和仅语言任务两个维度进行分类,共涵盖 154 个视觉 – 语言任务轨迹和 460 个仅语言任务轨迹,每个轨迹经过多次随机化后生成大量演示数据。
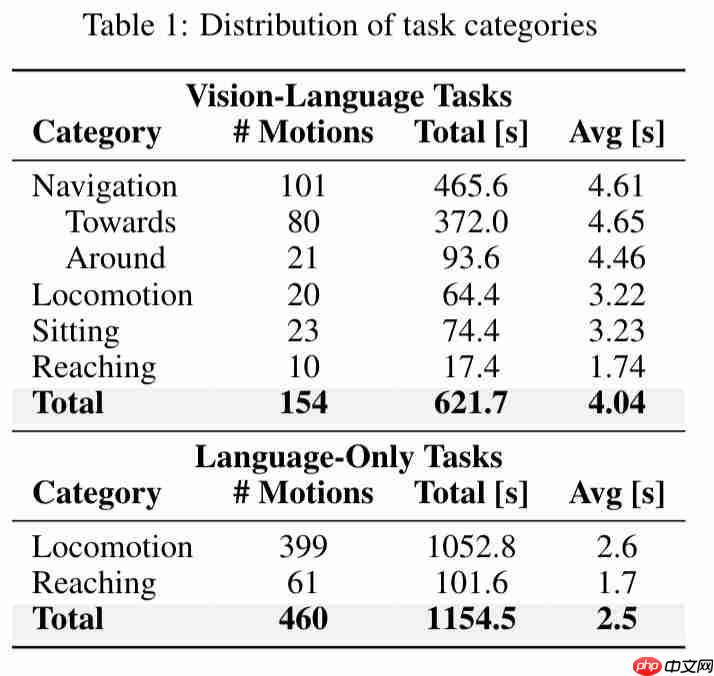
通过 154 条轨迹,每条随机化 100 次,生成了 17.1 小时的逼真运动轨迹数据。此外,还增加了 2.7 小时的仅语言数据,覆盖 500 条不同轨迹,进一步丰富了数据集。

在评估时,会在 20 个随机环境中进行,每个任务类别的场景纹理和物体属性完全随机化且在训练数据中未出现过,同时对第三人称相机角度进行局部随机化,确保评估任务在视觉上未在训练集中出现,以此检验模型的泛化能力。
实验结果
团队将 LeVERB 框架部署在 Unitree G1 机器人上,测试其在真实场景中的零样本闭环控制能力,让机器人执行如 ” 走向椅子坐下 ” 等任务。验证了 LeVERB 从仿真到真实的迁移能力,证明该框架在实际应用中的可行性。
通过在 LeVERB-Bench 基准上评估,LeVERB 框架表现出色,简单视觉导航任务零样本成功率达 80%,整体任务成功率为 58.5% ,比朴素分层 VLA 方案高出 7.8 倍。这表明 LeVERB 能有效处理复杂视觉 – 语言任务,在不同场景下具备良好的泛化能力。
还对 LeVERB 框架的关键组件进行消融实验,探究各组件对性能的影响,例如去掉判别器(ND)、运动学编码器(NE)等组件进行测试。
去掉判别器(ND)会导致性能显著下降,表明其在对齐潜在空间、增强模型泛化能力方面的重要性;去掉运动学编码器(NE)也会使性能降低,证明运动学编码器对补充运动细节信息的必要性。

团队成员半数为华人
LeVERB 团队有半数成员是来自 UC 伯克利、卡内基梅隆大学(CMU)等的华人学者。
该项目的主要负责人薛浩儒硕士毕业于卡内基梅隆大学(CMU),现于 UC 伯克利攻读博士学位。
他曾在 MPC Lab、LeCAR 实验室实验室进行机器人研究,现在 NVIDIA GEAR 实验室实习。
2021 年至 2024 年,他领导了 AI Racing Tech 项目——一个价值数百万美元的自动驾驶赛车研究项目。
该项目在 F1 级自动驾驶赛车上部署了真实世界的机器人学习,最高时速达到 160 英里。
AI Racing Tech 在 2022 年的美国印第安纳波利斯自动驾驶挑战赛中夺得亚军,在 2023 年夺得季军。
另一位负责人廖启源本科毕业于广东工业大学机电工程专业,目前是 UC 伯克利机械工程专业的博士研究生。
他的研究方向专注于开发新型机器和驱动方式、结合学习和基于模型的方法、协同设计硬件、学习和控制。
目前,他在波士顿动力公司实习。

感兴趣的朋友可以到原文中查看更多细节。
项目地址:https://ember-lab-berkeley.github.io/LeVERB-Website/
论文地址:https://arxiv.org/abs/2506.13751
参考链接:
https://x.com/HaoruXue/status/1937216452983160863
一键三连「点赞」「转发」「小心心」
欢迎在评论区留下你的想法!
— 完 —
量子位 AI 主题策划正在征集中!欢迎参与专题365 行 AI 落地方案,一千零一个 AI 应用,或与我们分享你在寻找的 AI 产品,或发现的AI 新动向。
也欢迎你加入量子位每日 AI 交流群,一起来畅聊 AI 吧~
一键关注 点亮星标
科技前沿进展每日见
以上就是人形机器人首次打通视觉感知与运动断层,UC 伯克利华人博士让宇树 G1 现场演示的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/148343.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫