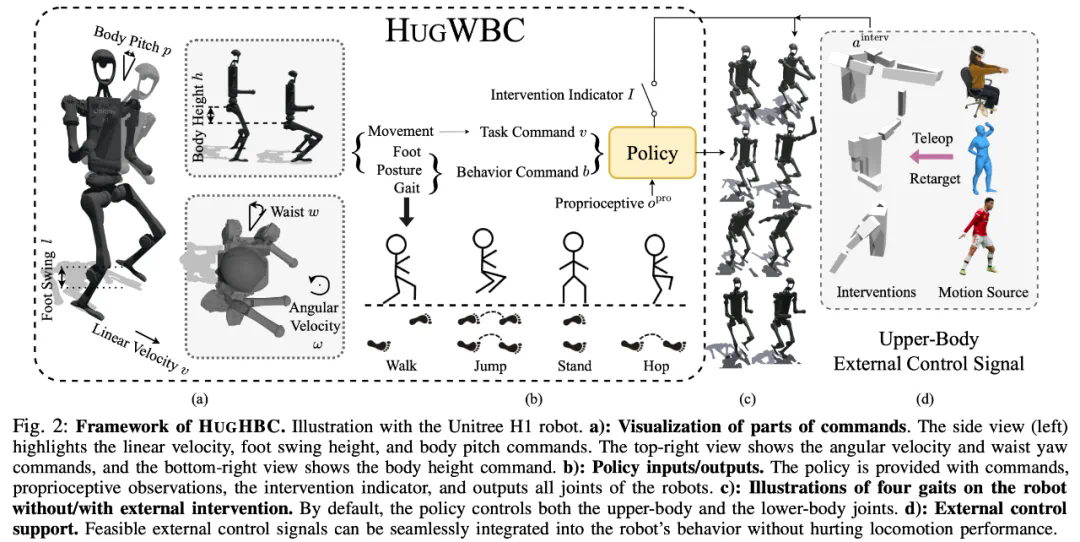
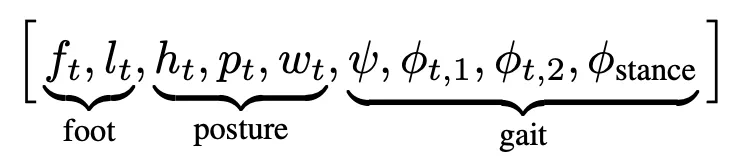
上海交通大学和上海人工智能实验室的研究团队研发了一种名为hugwbc的通用人形机器人控制器,赋予机器人多种步态(包括行走、跑步、双脚跳跃和单脚跳跃)及精细化运动控制能力。该控制器突破了以往仅依赖速度指令或关键点的限制,引入了扩展指令空间,包含任务指令(速度)和行为指令(姿态、脚步、步态),实现对机器人行为的细粒度调整。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

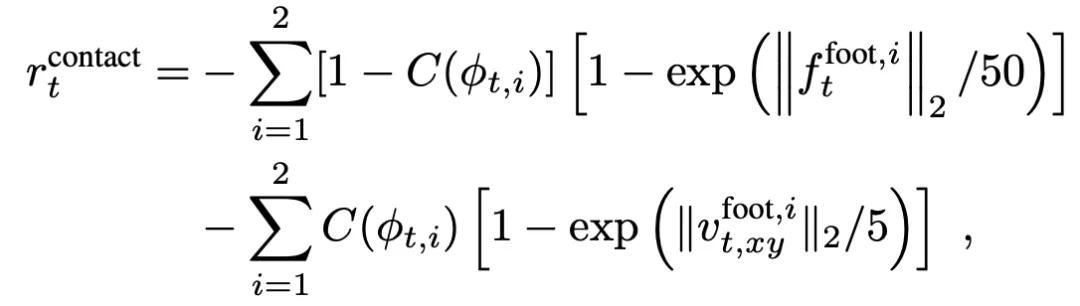
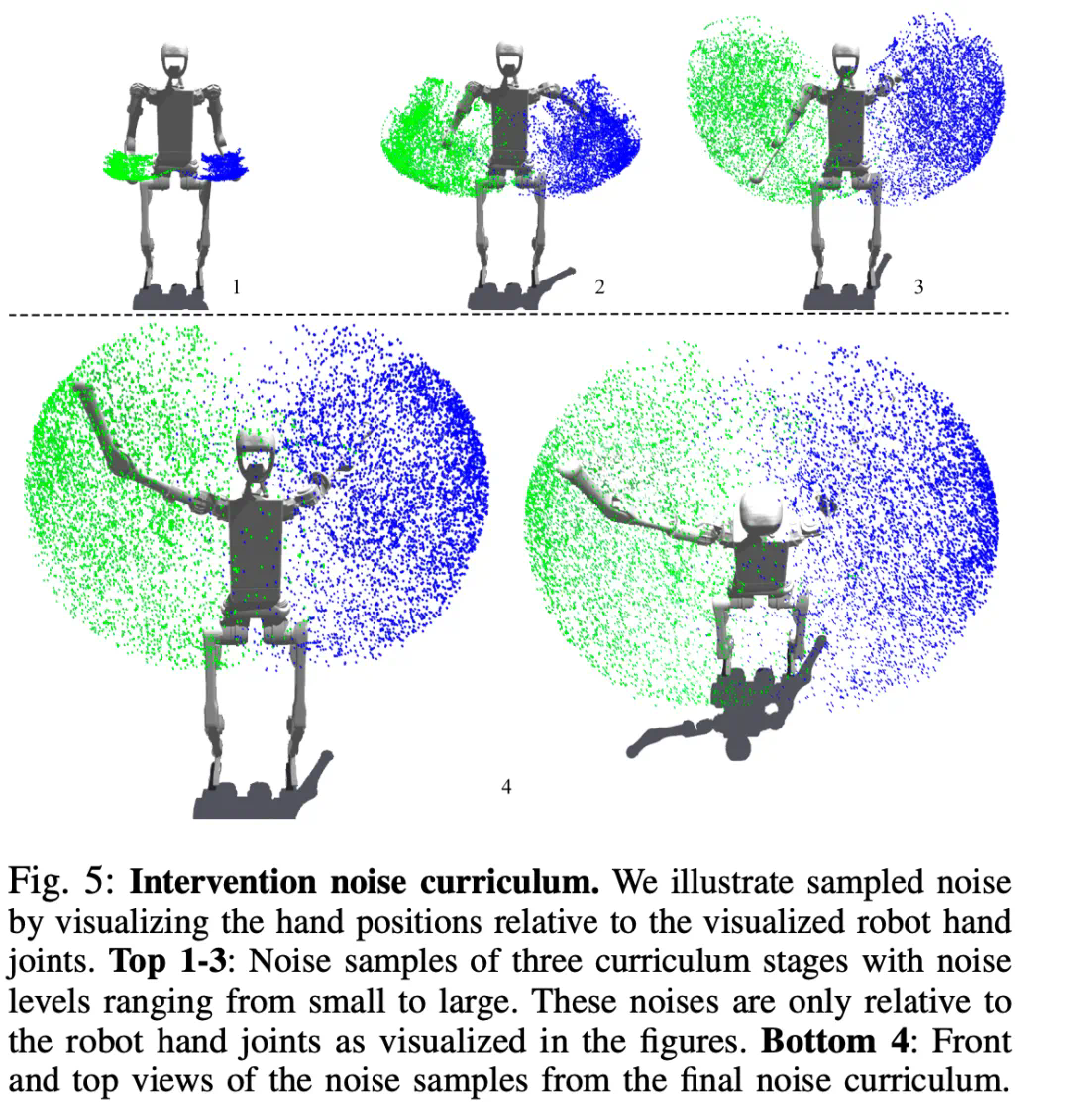
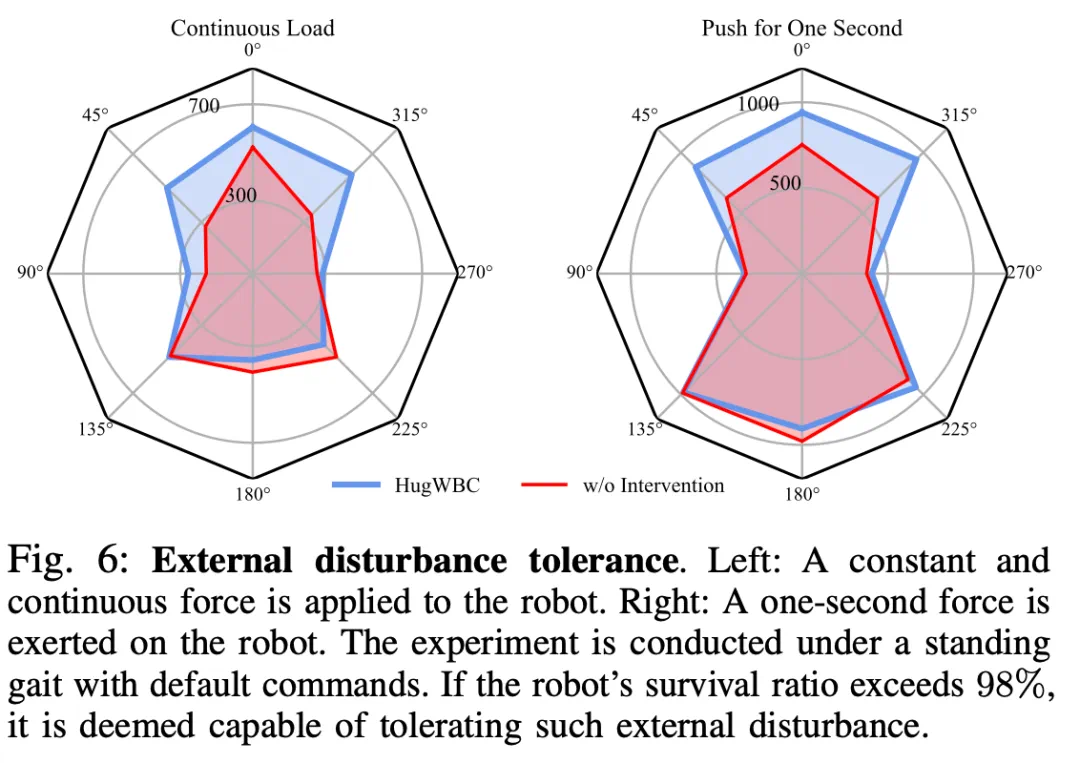
HugWBC框架整合了控制理论和强化学习,通过设计接触-摆动奖励和足端摆动奖励,引导机器人学习不同步态。 此外,它还利用对称奖励机制,鼓励机器人产生自然、对称的运动,并通过上肢噪声课程训练,提升控制器在外部上肢介入情况下的鲁棒性。
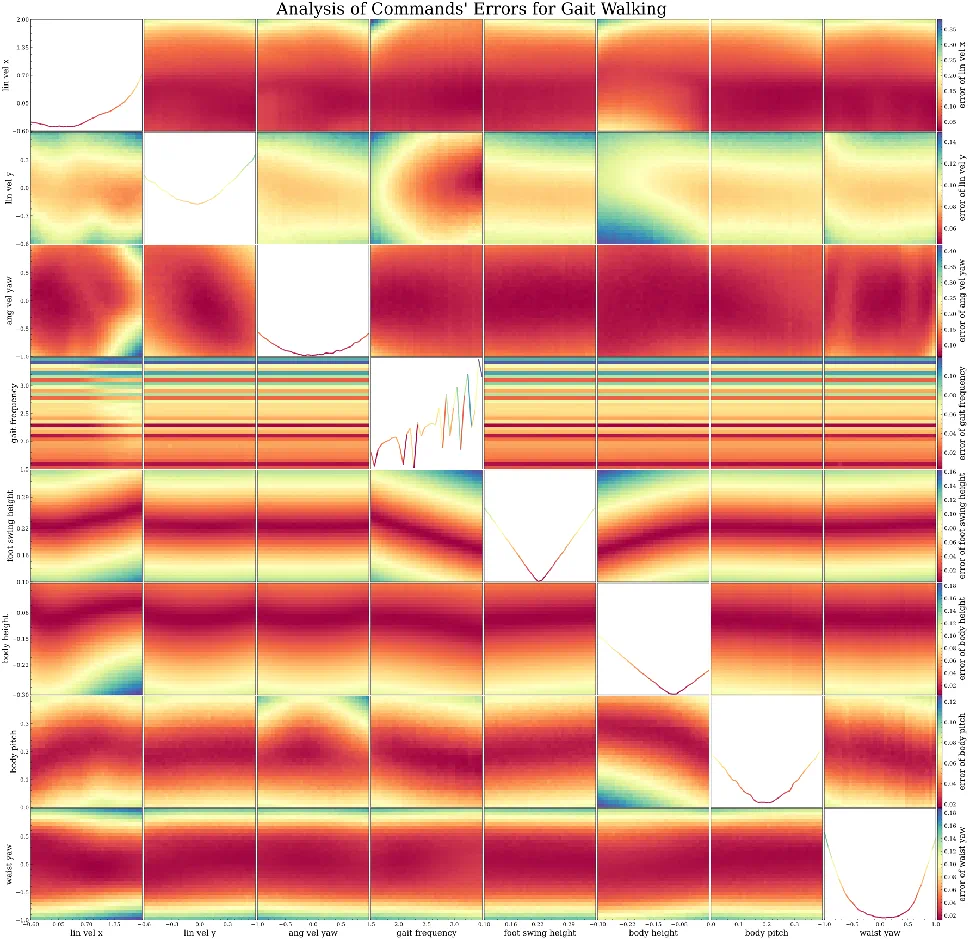
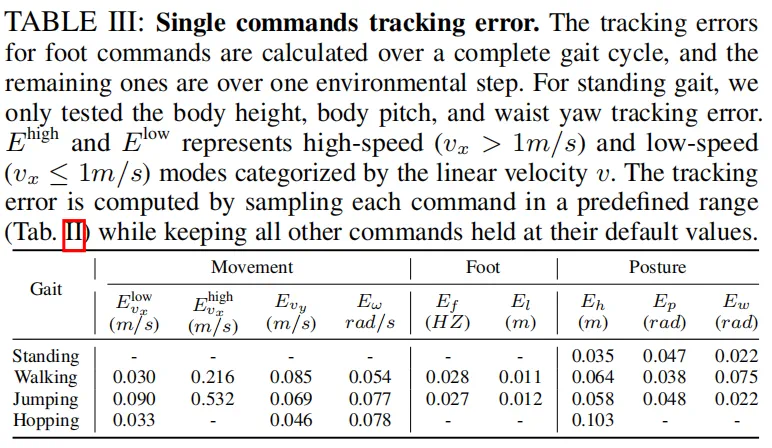
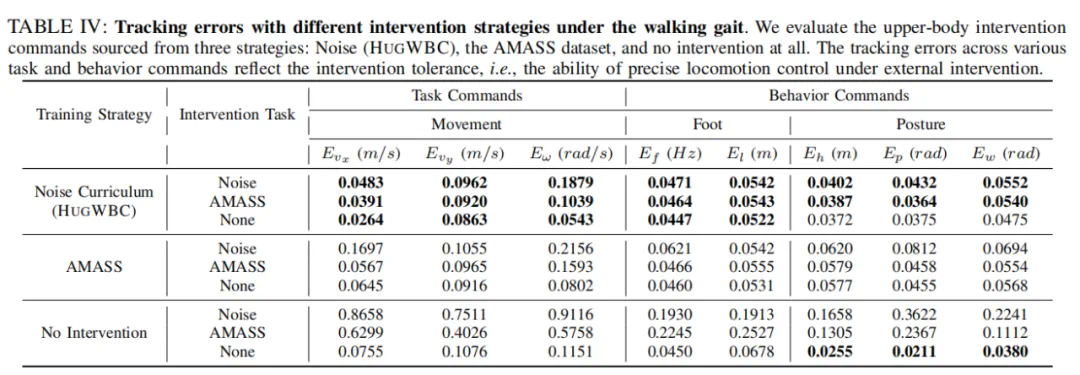
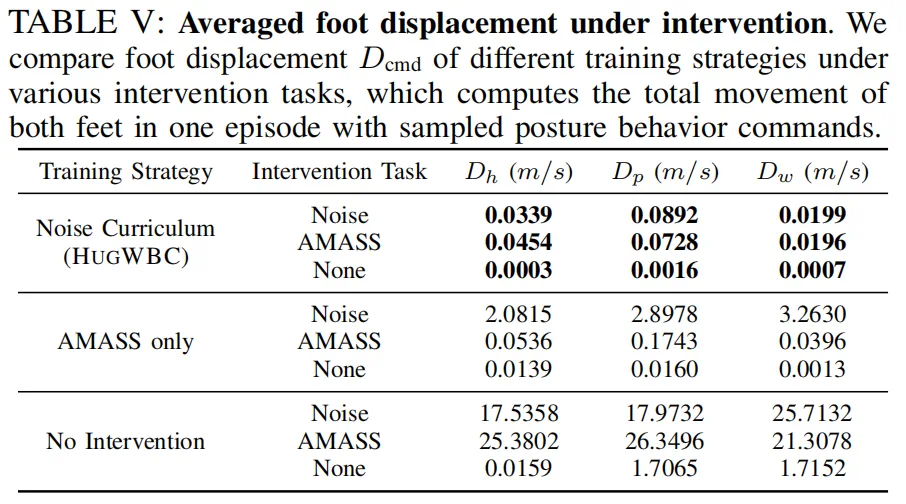
实验结果表明,HugWBC在指令跟踪精度和鲁棒性方面均优于基线方法。 它在各种步态下的指令跟踪误差较低,并能有效应对上肢干扰。 研究人员还通过热力图分析了不同指令组合对控制器性能的影响,揭示了指令间的相互作用关系。
总而言之,HugWBC控制器为人形机器人提供了更通用、更灵活的运动控制能力,为未来人形机器人在复杂环境下的应用奠定了坚实基础。项目主页:https://www.php.cn/link/e0ddc27e24c6e49ace5a5dcef6c784eb


以上就是从扭秧歌到单脚跳,HugWBC让人形机器人运动天赋觉醒了的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/182988.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫