hugwbc
-
从扭秧歌到单脚跳,HugWBC让人形机器人运动天赋觉醒了

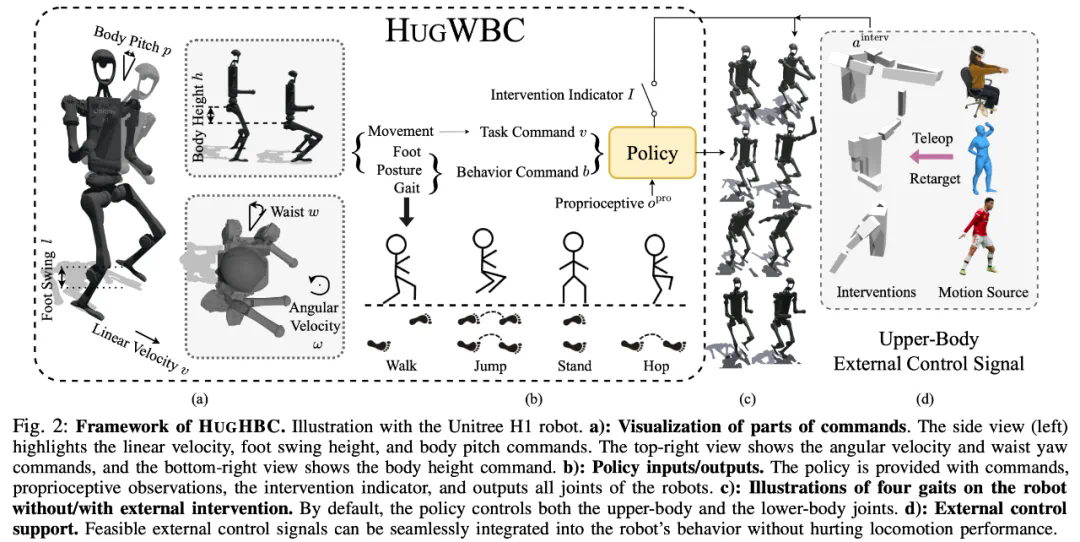
上海交通大学和上海人工智能实验室的研究团队研发了一种名为hugwbc的通用人形机器人控制器,赋予机器人多种步态(包括行走、跑步、双脚跳跃和单脚跳跃)及精细化运动控制能力。该控制器突破了以往仅依赖速度指令或关键点的限制,引入了扩展指令空间,包含任务指令(速度)和行为指令(姿态、脚步、步态),实现对机器…

上海交通大学和上海人工智能实验室的研究团队研发了一种名为hugwbc的通用人形机器人控制器,赋予机器人多种步态(包括行走、跑步、双脚跳跃和单脚跳跃)及精细化运动控制能力。该控制器突破了以往仅依赖速度指令或关键点的限制,引入了扩展指令空间,包含任务指令(速度)和行为指令(姿态、脚步、步态),实现对机器…
