具体使用教程:
https://www.php.cn/link/59e29dc7066b5a6fcf68b48e6dd67347https://www.php.cn/link/59e29dc7066b5a6fcf68b48e6dd67347/Tutorialssudo apt install ros-melodic-webots-ros
Webots和ROS使用指南(译)
 Webots和ROS SLAM联调效果
Webots和ROS SLAM联调效果
官方文档:
 官方文档和教程 要了解如何使用ROS连接Webots,请查看此处的说明。 这里提供了一步步配置Webots ROS的教程。 这里链接了一个视频教程。 完整的Webots ROS API记录在这里。 有关Webots的更多信息,请访问Cyberbotics的网站。 第三方贡献的kaist_webots功能集包含用于直接从ROS启动文件启动Webots节点的控制器和关节位置控制器,以及摇杆远程操作的控制器和关节状态发布器。
官方文档和教程 要了解如何使用ROS连接Webots,请查看此处的说明。 这里提供了一步步配置Webots ROS的教程。 这里链接了一个视频教程。 完整的Webots ROS API记录在这里。 有关Webots的更多信息,请访问Cyberbotics的网站。 第三方贡献的kaist_webots功能集包含用于直接从ROS启动文件启动Webots节点的控制器和关节位置控制器,以及摇杆远程操作的控制器和关节状态发布器。
报告错误 请在此处打开错误报告。
Webots用户指南 R2019a
使用ROS目录什么是ROS?Web的ROS标准控制器使用标准控制器自定义控制器什么是ROS?ROS(机器人操作系统)是用于机器人软件开发的框架,提供类似操作系统的功能,运行在异构计算机集群之上。ROS最初由斯坦福人工智能实验室于2007年开发。截至2019年,Willow Garage继续其开发。
ROS提供标准操作系统服务,如硬件抽象、低级设备控制、常用功能的实现、进程间消息传递以及包管理。它基于图形架构,处理发生在可以接收、发布和多路传感器、控制、状态、计划、执行器和其他消息的节点中。该库主要面向类Unix系统,在Linux下支持,在macOS上为实验版,在Windows下具有部分功能。
ROS有两个基本“方面”:操作系统方面,如上所述的ros,以及ROS包,一套用户贡献的包(组织成称为堆栈),实现功能如同步定位和地图构建、规划、感知、模拟等。
ROS是根据BSD许可条款发布的,是开源软件。它可以免费用于商业和研究用途。用户贡献的软件包根据各种开源许可证进行许可。
Web的ROS有两种方法可以在Web上使用ROS。第一个解决方案也是最简单的方案是使用标准ROS控制器。它是Webots默认控制器的一部分,可在任何项目中使用。该控制器可用于Webots中的任何机器人,并充当ROS节点,将所有Webots功能作为服务或主题提供给其他ROS节点。第二个定制且更复杂的方案是构建您自己的Webots控制器,它也将是使用Webots和ROS库的ROS节点。此方案仅适用于标准控制器无法完成的特定应用程序。
标准控制器该控制器使用“libCppController”库,并根据机器人的配置在ROS网络上提供可用的Webots功能。使用“roscpp”库,它主要将这些Webots功能作为ROS服务提供,并使用标准消息类型来避免对第三方软件包的依赖。
在模拟仿真期间,可以有多个机器人或设备实例以及连接到ROS网络的其他Webot应用程序。因此,控制器使用特定语法在网络上声明其服务或主题:[robot_unique_name]/[device_name]/[service/topic_name]。
[robot_unique_name]:为了避免同一机器人的不同实例之间存在任何误解,机器人的名称后面跟着进程的ID和计算机的IP地址。
[device_name]:由于相同的功能可以引用不同的设备,因此该字段显示它所引用的设备。
[service/topic_name]:此字段与其对应的Webots函数相同或非常接近。对于主题,接下来是采样周期。对于服务,它也是相应srv文件的名称。
使用标准控制器
名为ros的控制器已预编译,您不需要编辑它。您所要做的就是将它装入controller机器人的领域; 您会在默认的控制器列表中找到它。为了使用它,您必须构建一个ROS节点,该节点将使用可用的不同服务与机器人通信。在Webots中可以找到这种ROS节点的好例子WEBOTS_HOME/projects/languages/ros/webots_ros。
在教程7章节中,您将找到设置工作区并使用ROS运行示例模拟仿真的说明。
在下表中,您可以找到ros控制器参数列表。
 会译·对照式翻译
会译·对照式翻译
会译是一款AI智能翻译浏览器插件,支持多语种对照式翻译
 0 查看详情
0 查看详情 
–ROS_MASTER_URI=指定roscore正在运行的计算机的URI地址。
–name=指定要用于服务和主题的预定义[robot_unique_name]。请注意,您负责避免不同机器人控制器之间的任何名称冲突。
–synchronize默认情况下,ros即使没有连接ROS节点,控制器也不会阻止模拟。为了使模拟与ROS节点同步,–synchronize可以指定参数,以便只要time_step未调用机器人服务,模拟就不会运行。
–clock使用clock主题发布Webots时间。
–use-sim-time指定Webots时间应该用作ROS时间。要正常工作,还应定义–clock参数并将ROS参数设置use_sim_time为true。
ros控制器参数
如果要从另一台计算机访问控制器并且roscore未在与Webot相同的计算机上运行,则需要编辑ROS_MASTER_URI变量。这可以通过编辑环境变量,--ROS_MASTER_URI=
在控制器参数(参见表)中设置或使用runtime.ini控制器目录中的文件来完成。您还必须能够以ssh两种方式连接到每台计算机。由于ROS使用主机名查找网络上的其他计算机,因此必须将其他计算机的主机名和关联的IP地址添加到每台计算机的已知主机。您可以在名为hosts的文件中找到此列表。在Linux发行版上,您可以直接找到它/etc/hosts; 在macOS上,它位于/private/etc/hosts; 在Windows上,它位于C:WindowsSystem32driversetchosts。在Windows和macOS上,这是一个隐藏路径,您需要直接搜索此路径。hosts文件通常受到保护,您需要管理员或root权限才能对其进行编辑。
自定义控制器标准控制器的开发是为了适用于每个机器人和一般用途。有时,您可能无法使用此控制器执行您想要的操作,或者它太复杂了。在这种情况下,您可以构建自己的自定义控制器和ROS节点。
可以使用“roscpp”库在C ++中实现这样的ROS节点。但是,在这种情况下,您需要设置一个构建配置来处理来自ROS的“catkin_make”和来自Webots的“Makefile”,以便将结果二进制文件链接到Webots“libController”和“roscpp”库。
通过在Webots机器人或监督控制器中导入ROS库(roslib,rospy)和Webots库(控制器),也可以在Python中实现该控制器。
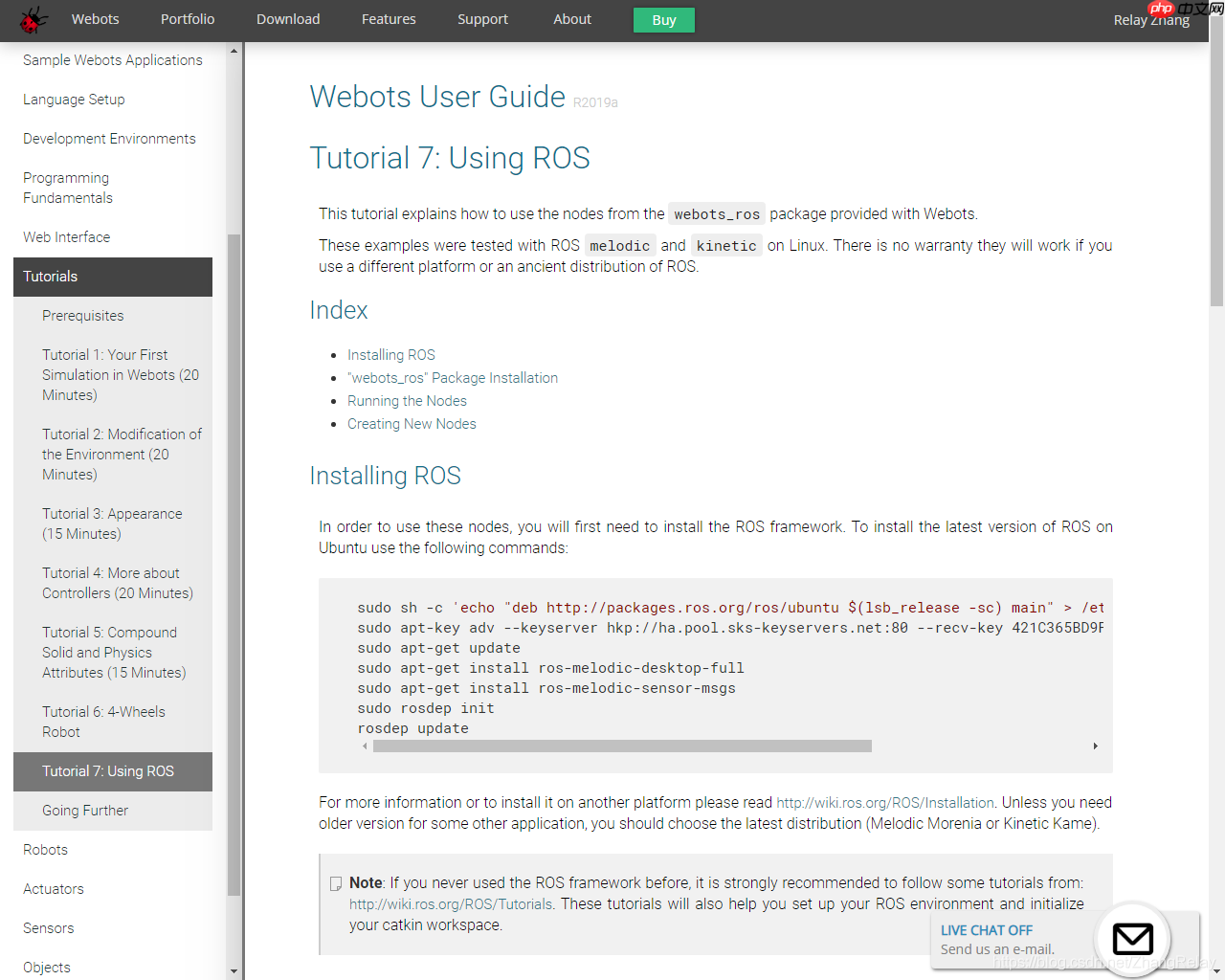
教程7:使用ROS本教程介绍如何使用webots_rosWebots提供的软件包中的节点。
这些示例使用ROS melodic和kineticLinux 进行了测试。如果您使用不同的平台或古老的ROS发行版,它们将无法保证。
目录安装ROS“webots_ros”包安装运行节点创建新节点安装ROS要使用这些节点,首先需要安装ROS框架。要在Ubuntu上安装最新版本的ROS,请使用以下命令:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116sudo apt-get updatesudo apt-get install ros-melodic-desktop-fullsudo apt-get install ros-melodic-sensor-msgssudo rosdep initrosdep update
有关更多信息或将其安装在其他平台上,请阅读http://wiki.ros.org/ROS/Installation。除非您需要旧版本用于其他应用程序,否则您应该选择最新版本(Melodic Morenia或Kinetic Kame)。
“webots_ros”包安装如果尚未创建任何catkin工作区,可以使用以下命令创建一个:
source /opt/ros//setup.bashmkdir -p catkin_ws/srccd catkin_ws/srccatkin_init_workspace
设置工作区后,必须将webots_ros位于“projects/languages/ros”中的src文件夹复制到catkin工作区的文件夹中。您还需要复制webots_ros包的服务列表和消息定义。简单地复制srv和msg位于文件夹“projects/default/controllers/ros/include”到src/webots_ros你的工作空间catkin的文件夹中。要复制Webots文件夹,catkin_ws/src可以使用以下说明:
cp -r /projects/languages/ros/webots_ros .cp -r /projects/default/controllers/ros/include/srv webots_ros/cp -r /projects/default/controllers/ros/include/msg webots_ros/
该webots_ros软件包已经包含一个“CmakeList.txt”,其中包含该软件包的构建说明。为了构建软件包,您所要做的就是运行:
cd catkin_wscatkin_make
运行节点现在您已经构建了包,您可以运行所需的示例。首先必须使用catkin工作区中的以下命令启动主节点:
source devel/setup.bashroscore
然后,您可以启动Webots并打开要运行的示例的世界(示例世界位于“projects/languages/ros/worlds”中)。当您开始模拟时,控制器应连接到主站并开始模拟,等待指令。
如果控制器无法连接到主节点,则可能意味着主节点不使用该标准ROS_MASTER_URI。您可以检查启动主节点的终端,ROS_MASTER_URI然后在控制器参数,环境变量或控制器目录的runtime.ini文件中添加正确的地址。
然后,您可以使用catkin工作区中的以下命令在新终端中启动与此示例对应的ROS节点:
source devel/setup.bashrosrun webots_ros [node_name]
例如,如果您打开世界“projects/languages/ros/worlds/panoramic_view_recorder.wbt”,则必须panoramic_view_recorder使用以下命令启动节点:
rosrun webots_ros panoramic_view_recorder
创建新节点这些示例仅显示了连接ROS和Webots的一些可能性,但您可以构建自己的节点以连接Webot。
该robot_information_parser节点是最基本的节点,是开始构建自己的节点的良好基础。该complete_test节点不显示任何特定应用程序,但包含几乎详尽的Webots API函数列表。
Webots API中的所有功能都有相应的服务或主题。您可以在、中找到与每个设备关联的所有服务和主题的定义。
ROS API通用服务Common Services下表描述了Webots设备之间共享的ROS服务。
get_boolbool ask—bool value
get_floatbool ask—float64 value
get_intbool ask—int32 value
get_stringbool ask—string value
get_uint64bool ask—uint64 value
set_boolbool value—bool success
set_floatfloat64 value—bool success
set_float_arrayfloat64[] values—bool success
set_intint32 value—bool success
set_stringstring value—bool success
以上就是Webots和ROS的使用说明(译)的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/445933.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫