本文介绍CNN注意力机制开篇之作Non-local,其解决传统CNN长距离特征提取不足问题,通过学习特征图点间相关性实现全局联系。文中实现了Embedded Gaussian等三种模块结构,在Cifar10上与ResNet18基线对比实验,发现BottleNeck结构和模块位置对效果影响大,不同版本Non-local性能有差异。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
一、闲聊
上个项目里,我们介绍了灰太狼和他的亲戚们……啊,不,是 ResNet 和它的变体们,包括 ResNet 本尊、ResNetV2、ResNeXt 等。其实,当时还出了一个号称“灰太狼最强亲戚”的 ResNeSt,这个家伙涨点的绝技就是在 ResNet 模型里加入了 Split-Attention 注意力模块(详情可以参考大佬的项目:ResNet最强变体ResNeSt —— 实现篇(Paddle动态图版本))。这个项目我们就来了解CNN的注意力机制,先从CV注意力的开篇之作 Non-local 走起~
二、Non-local 实现空间注意力的原理
在传统的CNN、DNN模型中,卷积层的计算只是将周围的特征加权加和,且一般当前层的计算只依赖前一层的结果,而现在的网络又大多使用1×1、3×3尺寸的小卷积核,对长距离相关特征的提取不足。(… a convolutional operation sums up the weighted input in a local neighborhood, and a recurrent operation at time i is often based only on the current and the latest time steps.)
全连接层虽然连接了相邻层的全部神经元,但只对单个神经元进行了权重学习,并未学习神经元之间的联系。(The non-local operation is also different from a fully-connected (fc) layer. Eq.(1) computes responses based on relationships between different locations, whereas fc uses learned weights. In other words, the relationship between xj and xi is not a function of the input data in fc, unlike in non-local layers.)
Non-local 注意力模块是借鉴了 Non-local 图片滤镜算法(Non-local image processing)、序列化处理的前馈神经网络(Feedforward modeling for sequences)和 自注意力机制(Self-attention)等工作,提出的一种提取特征图全局联系的通用模型结构,着力于学习特征图中的点与点之间的相关程度特征,公式如下:
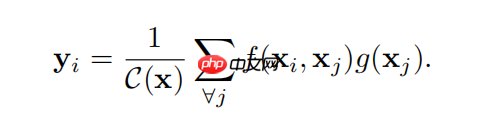
上式中, 计算特征图x中代表i,j两个点相关关系的标量。(A pairwise func-tion f computes a scalar (representing relationship such as affinity) between i and all j.)
计算特征图x中代表i,j两个点相关关系的标量。(A pairwise func-tion f computes a scalar (representing relationship such as affinity) between i and all j.) 计算的是代表特征图x中j点的值。(The unary function g computes a representation of the input signal at the position j.)最后
计算的是代表特征图x中j点的值。(The unary function g computes a representation of the input signal at the position j.)最后 计算出的特征图所有点之间的响应值通过
计算出的特征图所有点之间的响应值通过 进行标准化。(The response is normalized by a factor C(x).)
进行标准化。(The response is normalized by a factor C(x).)
如文章中所说,这种 Non-local 机制是一种通用(generic)的注意力实现方法,所以上式中的 可以使用不同的方式实现相关性计算。这就有了通过 Embedded Gaussion、Vanilla Gaussion、Dot product 和 Concatenation 几种方式实现的 Non-local 模块。后面我们会实现其中的前三种结构,并测试其对网络性能的提升作用。
可以使用不同的方式实现相关性计算。这就有了通过 Embedded Gaussion、Vanilla Gaussion、Dot product 和 Concatenation 几种方式实现的 Non-local 模块。后面我们会实现其中的前三种结构,并测试其对网络性能的提升作用。
文章地址:https://arxiv.org/abs/1711.07971作者源码地址:https://github.com/facebookresearch/video-nonlocal-net
三、Non-local 结构的实现
文章中对 Non-local 模块的结构总结如下图:
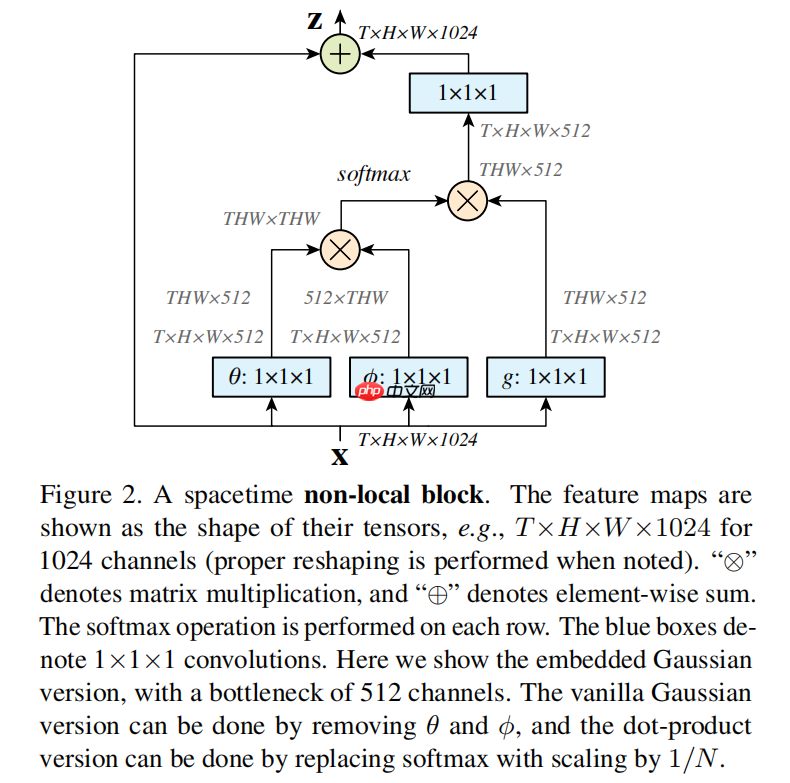
如上图所示,先将输入的特征图降维(降到1维)后逐次嵌入(embed)到 theta、phi 和 g 三个向量中。然后,将向量 theta 和向量 phi 的转置相乘,做 softmax 激活后再与向量 g 相乘。最后,再将这个 Non-local 操作包裹一层,这通过一个1×1的卷积核和一个跨层连接实现,以方便嵌入此注意力模块到现有系统中(We wrap the non-local operation in Eq.(1) into a non-local block that can be incorporated into many existing architectures.)。
在实现的过程中还要注意几个地方:
再将降维后的特征图嵌入三个向量中时,可以进行通道缩减(如上图所示缩减比例为一半),然后在最后经过1×1卷积时再升回来。这样类似 BottleNeck 的结构可以节省大约一半参数。(We set the number of channels represented by Wg, Wθ, and Wφ to be half of the number of channels in x. This follows the bottleneck design of [21] and reduces the computation of a block by about a half.)模块最后的1×1卷积后面加了一个 BN 层,这个 BN 层的放大系数(也就是权重参数)全部初始化为 0,以确保此模块的初始状态为恒等映射,使得其可以被插入到使用预训练权重的模型中去。(We add a BN layer right after the last 1×1×1 layer that represents Wz; we do not add BN to other layers in a non-local block. The scale parameter of this BN layer is initialized as zero, following [17]. This ensures that the initial state of the entire non-local block is an identity mapping, so it can be inserted into any pre-trained networks while maintaining its initial behavior.)文章中实现的是视频分类的 Non-local 模块,使用的是 T×H×W 的3D卷积,我们这里实现图片分类的 Non-local 模块时要去掉卷积的 T(时间)维度,采用2D卷积。
实现 Non-local 模块前先做好依赖项导入、参数设置、数据集处理等准备工作:
In [5]
import paddleimport paddle.nn as nnfrom paddle.io import DataLoaderimport numpy as npimport osimport paddle.vision.transforms as Tfrom paddle.vision.datasets import Cifar10import matplotlib.pyplot as plt%matplotlib inlineimport warningswarnings.filterwarnings("ignore", category=Warning) # 过滤报警信息BATCH_SIZE = 32PIC_SIZE = 96EPOCH_NUM = 30CLASS_DIM = 10PLACE = paddle.CPUPlace() # 在cpu上训练# PLACE = paddle.CUDAPlace(0) # 在gpu上训练# 数据集处理transform = T.Compose([ T.Resize(PIC_SIZE), T.Transpose(), T.Normalize([127.5, 127.5, 127.5], [127.5, 127.5, 127.5]),])train_dataset = Cifar10(mode='train', transform=transform)val_dataset = Cifar10(mode='test', transform=transform)train_loader = DataLoader(train_dataset, places=PLACE, shuffle=True, batch_size=BATCH_SIZE, drop_last=True, num_workers=0, use_shared_memory=False)valid_loader = DataLoader(val_dataset, places=PLACE, shuffle=False, batch_size=BATCH_SIZE, drop_last=True, num_workers=0, use_shared_memory=False)def save_show_pics(pics, file_name='tmp', save_path='./output/pics/', save_root_path='./output/'): if not os.path.exists(save_root_path): os.makedirs(save_root_path) if not os.path.exists(save_path): os.makedirs(save_path) shape = pics.shape pic = pics.transpose((0,2,3,1)).reshape([-1,8,PIC_SIZE,PIC_SIZE,3]) pic = np.concatenate(tuple(pic), axis=1) pic = np.concatenate(tuple(pic), axis=1) pic = (pic + 1.) / 2. plt.imsave(save_path+file_name+'.jpg', pic) # plt.figure(figsize=(8,8), dpi=80) plt.imshow(pic) plt.xticks([]) plt.yticks([]) plt.show()test_loader = DataLoader(train_dataset, places=PLACE, shuffle=True, batch_size=BATCH_SIZE, drop_last=True, num_workers=0, use_shared_memory=False)data, label = next(test_loader())save_show_pics(data.numpy())
1.Embedded Gaussian 实现 Non-local 模块
如以上所描述的,我们实现的就是最常用的用 Embedded Gaussian 实现的 Non-local 模块:
In [ ]
class EmbeddedGaussion(nn.Layer): def __init__(self, shape): super(EmbeddedGaussion, self).__init__() input_dim = shape[1] self.theta = nn.Conv2D(input_dim, input_dim // 2, 1) self.phi = nn.Conv2D(input_dim, input_dim // 2, 1) self.g = nn.Conv2D(input_dim, input_dim // 2, 1) self.conv = nn.Conv2D(input_dim // 2, input_dim, 1) self.bn = nn.BatchNorm2D(input_dim, weight_attr=paddle.ParamAttr(initializer=nn.initializer.Constant(0))) def forward(self, x): shape = x.shape theta = paddle.flatten(self.theta(x), start_axis=2, stop_axis=-1) phi = paddle.flatten(self.phi(x), start_axis=2, stop_axis=-1) g = paddle.flatten(self.g(x), start_axis=2, stop_axis=-1) non_local = paddle.matmul(theta, phi, transpose_y=True) non_local = nn.functional.softmax(non_local) non_local = paddle.matmul(non_local, g) non_local = paddle.reshape(non_local, [shape[0], shape[1] // 2, shape[2], shape[3]]) non_local = self.bn(self.conv(non_local)) return non_local + xnl = EmbeddedGaussion([16, 16, 8, 8])x = paddle.to_tensor(np.random.uniform(-1, 1, [16, 16, 8, 8]).astype('float32'))y = nl(x)print(y.shape)
[16, 16, 8, 8]
2.Vanilla Gaussian 实现 Non-local 模块
Embedded Gaussian 实现的 Non-local 模块如果去掉特征图嵌入向量 theta 和向量 g 的操作,就是普通的用 Vanilla Gaussian 实现的 Non-local 版本了。当然,没有了前面的1×1卷积,通道缩减也就无从谈起了。
In [ ]
class VanillaGaussion(nn.Layer): def __init__(self, shape): super(VanillaGaussion, self).__init__() input_dim = shape[1] self.g = nn.Conv2D(input_dim, input_dim, 1) self.conv = nn.Conv2D(input_dim, input_dim, 1) self.bn = nn.BatchNorm(input_dim) def forward(self, x): shape = x.shape theta = paddle.flatten(x, start_axis=2, stop_axis=-1) phi = paddle.flatten(x, start_axis=2, stop_axis=-1) g = paddle.flatten(self.g(x), start_axis=2, stop_axis=-1) non_local = paddle.matmul(theta, phi, transpose_y=True) non_local = nn.functional.softmax(non_local) non_local = paddle.matmul(non_local, g) non_local = paddle.reshape(non_local, shape) non_local = self.bn(self.conv(non_local)) return non_local + xnl = VanillaGaussion([16, 16, 8, 8])x = paddle.to_tensor(np.random.uniform(-1, 1, [16, 16, 8, 8]).astype('float32'))y = nl(x)print(y.shape)
[16, 16, 8, 8]
3.Dot Production 实现 Non-local 模块
Embedded Gaussian 实现 Non-local 的模块如果去掉 SoftMax 激活操作,通过除以 N(N 为特征图的位置数量)进行缩放代替,就是 Dot Production 实现的 Non-local 版本了。
In [ ]
class DotProduction(nn.Layer): def __init__(self, shape): super(DotProduction, self).__init__() input_dim = shape[1] self.theta = nn.Conv2D(input_dim, input_dim // 2, 1) self.phi = nn.Conv2D(input_dim, input_dim // 2, 1) self.g = nn.Conv2D(input_dim, input_dim // 2, 1) self.conv = nn.Conv2D(input_dim // 2, input_dim, 1) self.bn = nn.BatchNorm(input_dim) def forward(self, x): shape = x.shape theta = paddle.flatten(self.theta(x), start_axis=2, stop_axis=-1) phi = paddle.flatten(self.phi(x), start_axis=2, stop_axis=-1) g = paddle.flatten(self.g(x), start_axis=2, stop_axis=-1) non_local = paddle.matmul(theta, phi, transpose_y=True) non_local = non_local / shape[2] non_local = paddle.matmul(non_local, g) non_local = paddle.reshape(non_local, [shape[0], shape[1] // 2, shape[2], shape[3]]) non_local = self.bn(self.conv(non_local)) return non_local + xnl = DotProduction([16, 16, 8, 8])x = paddle.to_tensor(np.random.uniform(-1, 1, [16, 16, 8, 8]).astype('float32'))y = nl(x)print(y.shape)
[16, 16, 8, 8]
四、Non-local 的运行对比效果
下面我们就来实验下刚才实现的三个版本的 Non-local 模块的效果。原文是在视频分类数据集上做的实验,这里我们用 Paddle 内置的 Cifar10 图片分类数据集做下实验。
1.运行 ResNet18 基线版本
在 ResNet18 模型结构上加上一个残差块作为基线版本,后面的 Non-local 模块就替换这个残差块。这样能确认效果的提升来自 Non-Local 结构,而非增加的参数。
In [ ]
class Residual(nn.Layer): def __init__(self, num_channels, num_filters, use_1x1conv=False, stride=1): super(Residual, self).__init__() self.use_1x1conv = use_1x1conv model = [ nn.Conv2D(num_channels, num_filters, 3, stride=stride, padding=1), nn.BatchNorm2D(num_filters), nn.ReLU(), nn.Conv2D(num_filters, num_filters, 3, stride=1, padding=1), nn.BatchNorm2D(num_filters), ] self.model = nn.Sequential(*model) if use_1x1conv: model_1x1 = [nn.Conv2D(num_channels, num_filters, 1, stride=stride)] self.model_1x1 = nn.Sequential(*model_1x1) def forward(self, X): Y = self.model(X) if self.use_1x1conv: X = self.model_1x1(X) return paddle.nn.functional.relu(X + Y)class ResnetBlock(nn.Layer): def __init__(self, num_channels, num_filters, num_residuals, first_block=False): super(ResnetBlock, self).__init__() model = [] for i in range(num_residuals): if i == 0: if not first_block: model += [Residual(num_channels, num_filters, use_1x1conv=True, stride=2)] else: model += [Residual(num_channels, num_filters)] else: model += [Residual(num_filters, num_filters)] self.model = nn.Sequential(*model) def forward(self, X): return self.model(X)class ResNet(nn.Layer): def __init__(self, num_classes=10): super(ResNet, self).__init__() model = [ nn.Conv2D(3, 64, 7, stride=2, padding=3), nn.BatchNorm2D(64), nn.ReLU(), nn.MaxPool2D(kernel_size=3, stride=2, padding=1) ] model += [ ResnetBlock(64, 64, 2, first_block=True), ResnetBlock(64, 128, 2), # ResnetBlock(128, 256, 2), ResnetBlock(128, 256, 2 + 1), ResnetBlock(256, 512, 2) ] model += [ nn.AdaptiveAvgPool2D(output_size=1), nn.Flatten(start_axis=1, stop_axis=-1), nn.Linear(512, num_classes), ] self.model = nn.Sequential(*model) def forward(self, X): Y = self.model(X) return Y# 模型定义model = paddle.Model(ResNet(num_classes=CLASS_DIM))# 设置训练模型所需的optimizer, loss, metricmodel.prepare( paddle.optimizer.Adam(learning_rate=1e-4, parameters=model.parameters()), paddle.nn.CrossEntropyLoss(), paddle.metric.Accuracy(topk=(1, 5)))# 启动训练、评估model.fit(train_loader, valid_loader, epochs=EPOCH_NUM, log_freq=500, callbacks=paddle.callbacks.VisualDL(log_dir='./log/BLResNet18+1'))
The loss value printed in the log is the current step, and the metric is the average value of previous step.Epoch 1/30
2.测试加入 Non-local 模块的版本
分别测试用 Embedded Gaussian、Vanilla Gaussian 和 Dot Production 方法实现的 Non-local 模块的效果。
In [ ]
class Residual(nn.Layer): def __init__(self, num_channels, num_filters, use_1x1conv=False, stride=1): super(Residual, self).__init__() self.use_1x1conv = use_1x1conv model = [ nn.Conv2D(num_channels, num_filters, 3, stride=stride, padding=1), nn.BatchNorm2D(num_filters), nn.ReLU(), nn.Conv2D(num_filters, num_filters, 3, stride=1, padding=1), nn.BatchNorm2D(num_filters), ] self.model = nn.Sequential(*model) if use_1x1conv: model_1x1 = [nn.Conv2D(num_channels, num_filters, 1, stride=stride)] self.model_1x1 = nn.Sequential(*model_1x1) def forward(self, X): Y = self.model(X) if self.use_1x1conv: X = self.model_1x1(X) return paddle.nn.functional.relu(X + Y)class ResnetBlock(nn.Layer): def __init__(self, num_channels, num_filters, num_residuals, first_block=False): super(ResnetBlock, self).__init__() model = [] for i in range(num_residuals): if i == 0: if not first_block: model += [Residual(num_channels, num_filters, use_1x1conv=True, stride=2)] else: model += [Residual(num_channels, num_filters)] else: model += [Residual(num_filters, num_filters)] self.model = nn.Sequential(*model) def forward(self, X): return self.model(X)class ResNetNonLocal(nn.Layer): def __init__(self, num_classes=10): super(ResNetNonLocal, self).__init__() model = [ nn.Conv2D(3, 64, 7, stride=2, padding=3), nn.BatchNorm2D(64), nn.ReLU(), nn.MaxPool2D(kernel_size=3, stride=2, padding=1) ] model += [ ResnetBlock(64, 64, 2, first_block=True), ResnetBlock(64, 128, 2), ResnetBlock(128, 256, 2), EmbeddedGaussion([BATCH_SIZE, 256, 14, 14]), # VanillaGaussion([BATCH_SIZE, 256, 14, 14]), # DotProduction([BATCH_SIZE, 256, 14, 14]), # # EmbeddedGaussionNoBottleNeck([BATCH_SIZE, 256, 14, 14]), ResnetBlock(256, 512, 2), ] model += [ nn.AdaptiveAvgPool2D(output_size=1), nn.Flatten(start_axis=1, stop_axis=-1), nn.Linear(512, num_classes), ] self.model = nn.Sequential(*model) def forward(self, X): Y = self.model(X) return Y# 模型定义model = paddle.Model(ResNetNonLocal(num_classes=CLASS_DIM))# 设置训练模型所需的optimizer, loss, metricmodel.prepare( paddle.optimizer.Adam(learning_rate=1e-4, parameters=model.parameters()), paddle.nn.CrossEntropyLoss(), paddle.metric.Accuracy(topk=(1, 5)))# 启动训练、评估model.fit(train_loader, valid_loader, epochs=EPOCH_NUM, log_freq=500, callbacks=paddle.callbacks.VisualDL(log_dir='./log/EmbeddedGaussion'))# model.fit(train_loader, valid_loader, epochs=EPOCH_NUM, log_freq=500, # callbacks=paddle.callbacks.VisualDL(log_dir='./log/VanillaGaussion'))# model.fit(train_loader, valid_loader, epochs=EPOCH_NUM, log_freq=500, # callbacks=paddle.callbacks.VisualDL(log_dir='./log/DotProduction'))
The loss value printed in the log is the current step, and the metric is the average value of previous step.Epoch 1/30
上面的代码需要运行三次,每次需要注释掉 ResNetNonLocal 类的 forward() 方法里不同版本的 Non-local 模块,并且在 model.fit 写入VisualDL 的 log 文件时用不同的名称。
接下来,我们对比下运行结果的验证集准确率:
1)测试 Vanilla Gaussian 版本 Non-local 模块
 上图中,蓝色线为 ResNet18 加一个残差块的基线版本的验证集准确率曲线,紫色线为加入Vanilla Gaussian 版本 Non-local 模块后模型的验证集准确率曲线。改进的模型准曲率提高了0.3%。
上图中,蓝色线为 ResNet18 加一个残差块的基线版本的验证集准确率曲线,紫色线为加入Vanilla Gaussian 版本 Non-local 模块后模型的验证集准确率曲线。改进的模型准曲率提高了0.3%。
2)测试 Dot Production 版本 Non-local 模块
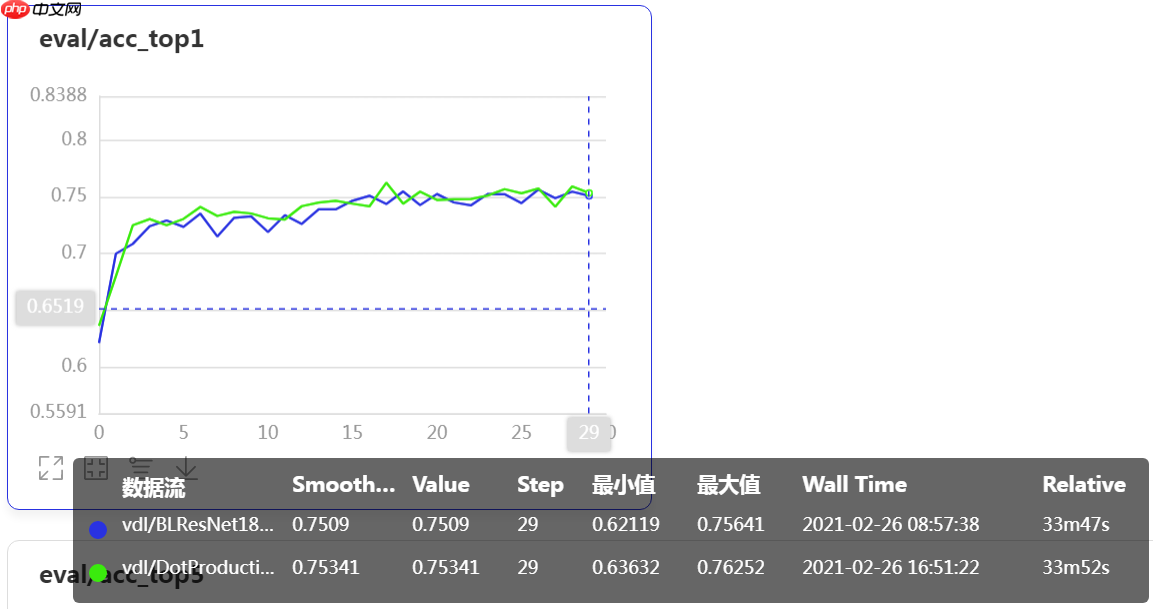 蓝色线仍为基线模型准确率,绿线为加入Dot Production 版本 Non-local 模块后模型的准确率。改进的模型准曲率提高了0.6%。
蓝色线仍为基线模型准确率,绿线为加入Dot Production 版本 Non-local 模块后模型的准确率。改进的模型准曲率提高了0.6%。
3)测试 Embedded Gaussian 版本 Non-local 模块
最后来测试下“顶配”版本的。 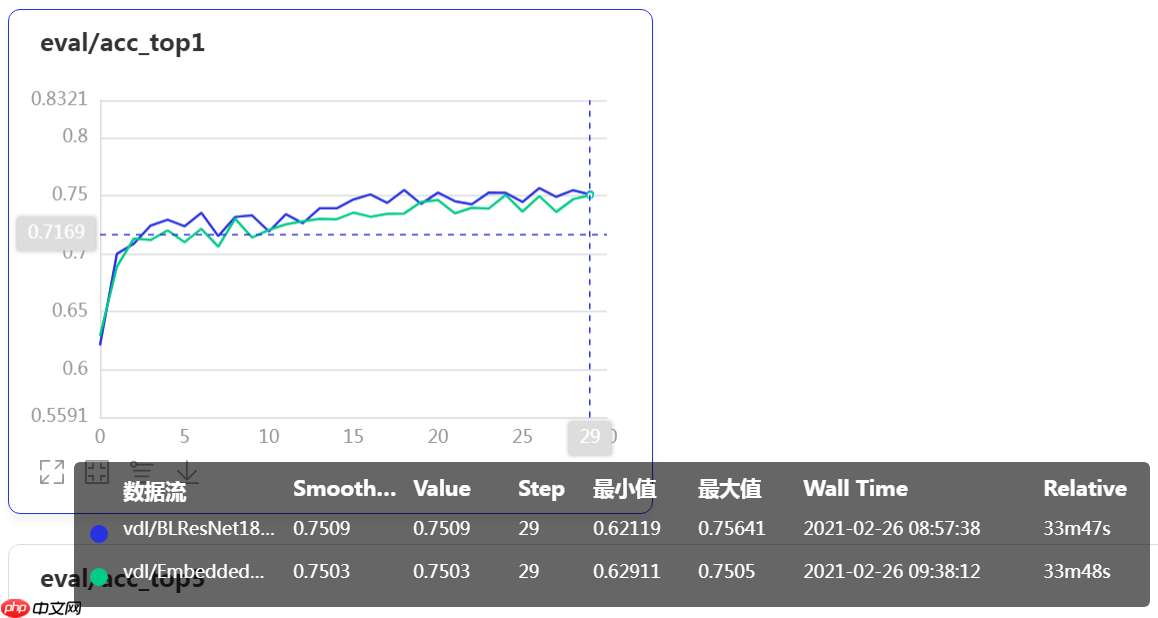 仍然蓝色线为基线模型数据…我去,这么好的装备怎么出现了这么差的结果,加了 Embedded Gaussian 版本 Non-local 模块的模型精度甚至低于基线模型的精度,这是肿么回事?!&@%
仍然蓝色线为基线模型数据…我去,这么好的装备怎么出现了这么差的结果,加了 Embedded Gaussian 版本 Non-local 模块的模型精度甚至低于基线模型的精度,这是肿么回事?!&@%
一顿修改猛如虎之后(换模型结构、换数据集、换数据增强、换超参),似乎找到一点儿线索。
4)测试不缩减通道数的 Embedded Gaussian 版本 Non-local 模块
在下面这个 Embedded Gaussian 版本 Non-local 模块中,我们不在1×1卷积上采用类似 BottleNeck 的结构缩减通道数。
In [4]
class EmbeddedGaussionNoBottleNeck(nn.Layer): def __init__(self, shape): super(EmbeddedGaussionNoBottleNeck, self).__init__() input_dim = shape[1] self.theta = nn.Conv2D(input_dim, input_dim, 1) self.phi = nn.Conv2D(input_dim, input_dim, 1) self.g = nn.Conv2D(input_dim, input_dim, 1) self.conv = nn.Conv2D(input_dim, input_dim, 1) self.bn = nn.BatchNorm(input_dim) def forward(self, x): shape = x.shape theta = paddle.flatten(self.theta(x), start_axis=2, stop_axis=-1) phi = paddle.flatten(self.phi(x), start_axis=2, stop_axis=-1) g = paddle.flatten(self.g(x), start_axis=2, stop_axis=-1) non_local = paddle.matmul(theta, phi, transpose_y=True) non_local = nn.functional.softmax(non_local) non_local = paddle.matmul(non_local, g) non_local = paddle.reshape(non_local, shape) non_local = self.bn(self.conv(non_local)) return non_local + xnl = EmbeddedGaussionNoBottleNeck([16, 16, 8, 8])x = paddle.to_tensor(np.random.uniform(-1, 1, [16, 16, 8, 8]).astype('float32'))y = nl(x)print(y.shape)
[16, 16, 8, 8]
训练后与基线模型对照下:  蓝色为基线模型版本曲线。在增加了 Non-local 模块的宽度后,性能和基线版本差不多,虽然没有 Vanilla Gaussian 和 Dot Production 实现的版本提升的精度多,但已经比原来的降低通道数的 Embedded Gaussian 版本好了不少。
蓝色为基线模型版本曲线。在增加了 Non-local 模块的宽度后,性能和基线版本差不多,虽然没有 Vanilla Gaussian 和 Dot Production 实现的版本提升的精度多,但已经比原来的降低通道数的 Embedded Gaussian 版本好了不少。
五、总结
各种消融实验完毕,总结学习体会。
无论是在 Non-local 结构还是在 ResNet 的残差块中,BottleNeck 结构只适合在深层网络中用于减少参数量。在原版的 ResNet 的结构里,也只有 50 层以上的配置才会使用 BottleNeck 结构。这也解释了在前面项目实验(ResNet一族)中,后面出的一些 ResNet 魔该版本,基本都是在 50 层以上挑战大规模数据集。这些改动都是建立在 BottelNeck 基础上的,所以才用在我们的浅层网络中会效果欠佳。这可能是因为深层的网络中,被激活的神经元更稀疏,才能通过 BottelNeck 使用更窄的网络来减少参数。而在较浅的网络中,网络的宽度对性能影响还是挺大的。Non-local 模块的使用位置是很重要的,在模型的不同层加入注意力模块的效果大相径庭,在不同的数据集上效果也不同(在224×224尺寸的OxfordFlower102 和 CalTech201 数据集上,找这个合适的位置更难,放弃了。我想也许作者当年在视频数据集上做实验也是有原因的吧。),加注意力模块的位置不好反而会使模型性能下降。有的信息说注意力快适合用在前面的层,但是在这个实验里,还是放在后面用来提取更大粒度特征图的位置相关特征时效果更好。
以上就是一文搞懂卷积网络之四(空间注意力Non-local)的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/63414.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫