从一个新颖的3d mllm架构开始,该架构使用稀疏查询将视觉表示提升和压缩到3d,然后将其输入llm。
题目:OmniDrive: A Holistic LLM-Agent Framework for Autonomous Driving with 3D Perception Reasoning and Planning
作者单位:北京理工大学,NVIDIA,华中科技大学
开源地址:GitHub – NVlabs/OmniDrive
 INFINITE ALBUM
INFINITE ALBUM
面向游戏玩家的生成式AI音乐
 144 查看详情
144 查看详情 
多模态大语言模型(MLLMs)的发展导致了对基于LLM的自动驾驶的兴趣不断增长,利用它们强大的推理能力。利用MLLMs强大的推理能力来改进规划行为是具有挑战性的,因为它们需要超越2D推理的完整3D情境意识。为了解决这一挑战,本工作提出了OmniDrive,这是一个关于智能体模型与3D驱动任务之间强大对齐的全面框架。框架从一个新颖的3D+MLLM架构开始,该架构使用稀疏查询将观察表达提升和压缩到3D,然后将其输入LLM。这种基于查询的表达允许我们联合编码动态对象和静态地图元素(例如,交通道路),为3D中的感知-行动对齐提供了一个简洁的世界模型。进一步提出了一个新的基准,其中包括全面的视觉问答(VQA)任务,包括场景描述、交通规则、3D基础、反事实推理、决策制定和规划。广泛的研究表明,OmniDrive在复杂的3D场景中具有出色的推理和规划能力。
网络结构
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜


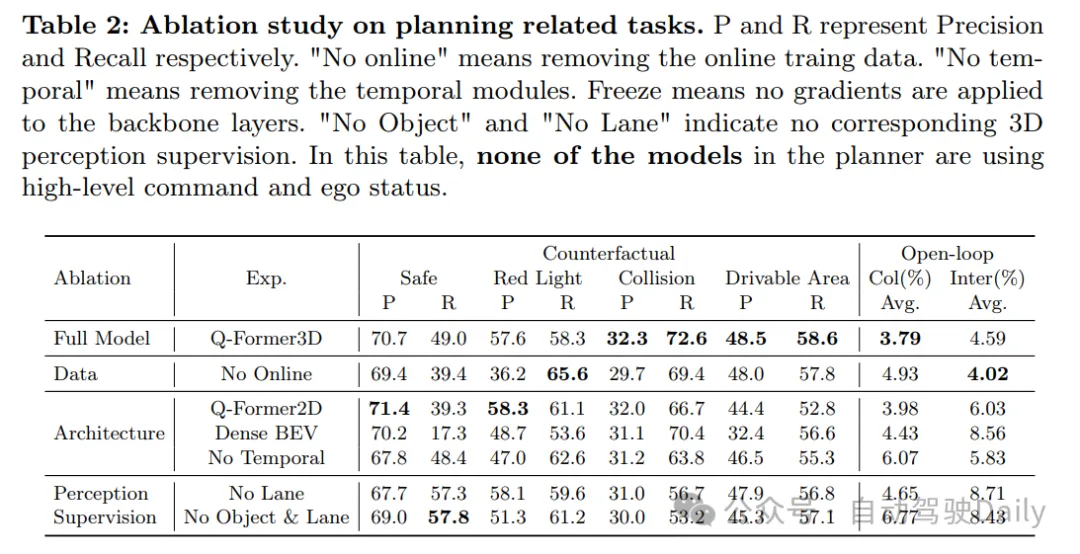
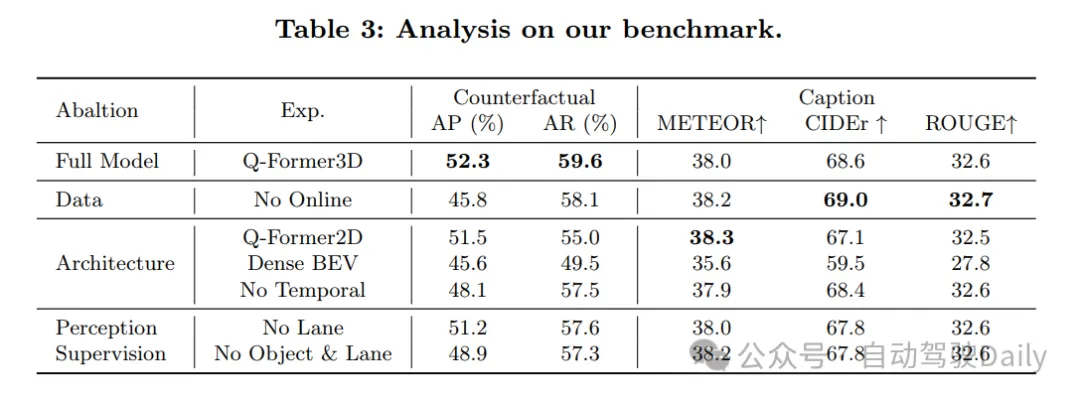
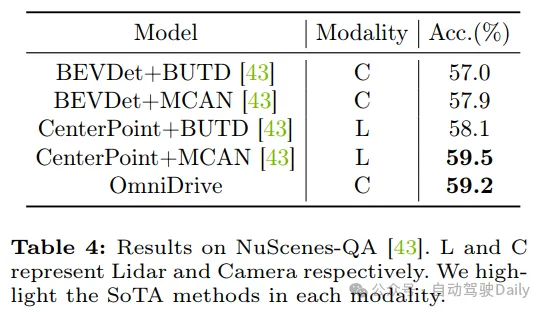
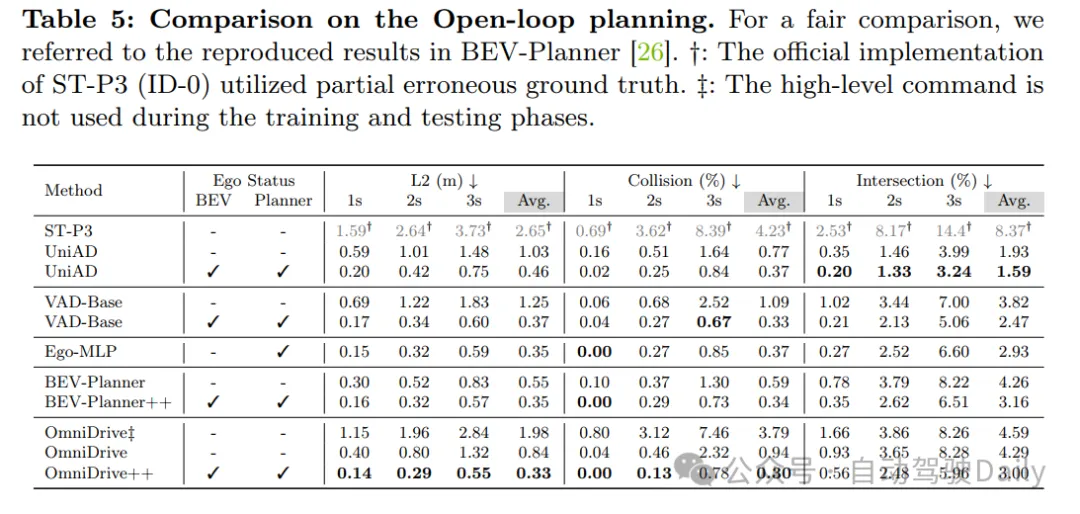
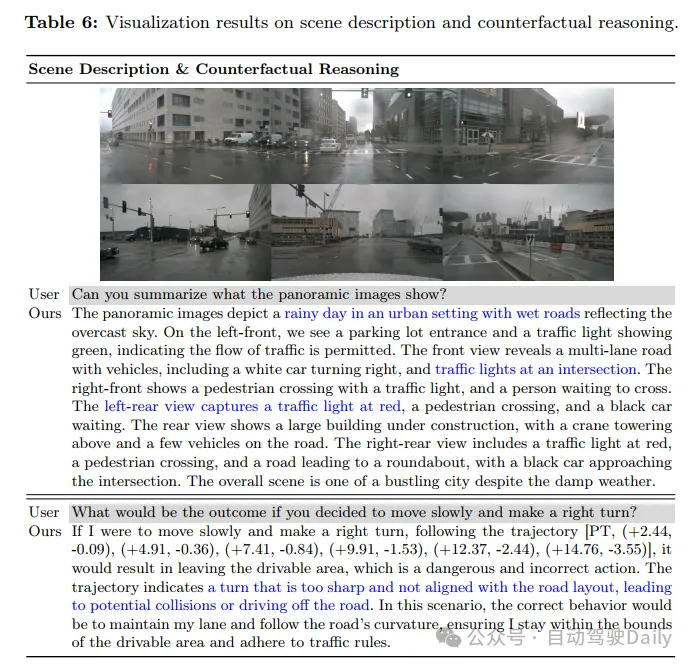
实验结果
以上就是OmniDrive: 一个关于大模型与3D驾驶任务对齐的框架的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/796900.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫