
自动驾驶
-
NeuRAD:领先多数据集的神经渲染技术在自动驾驶中的应用
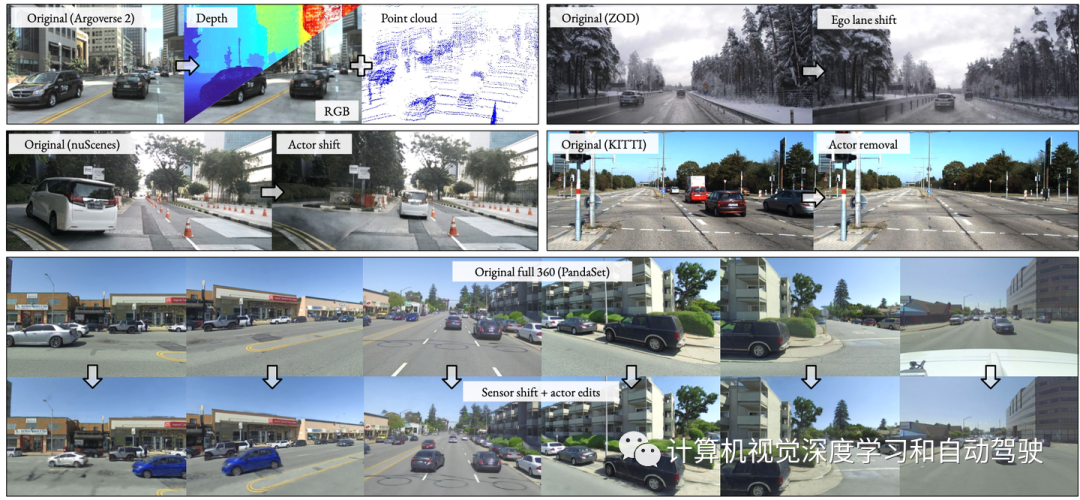
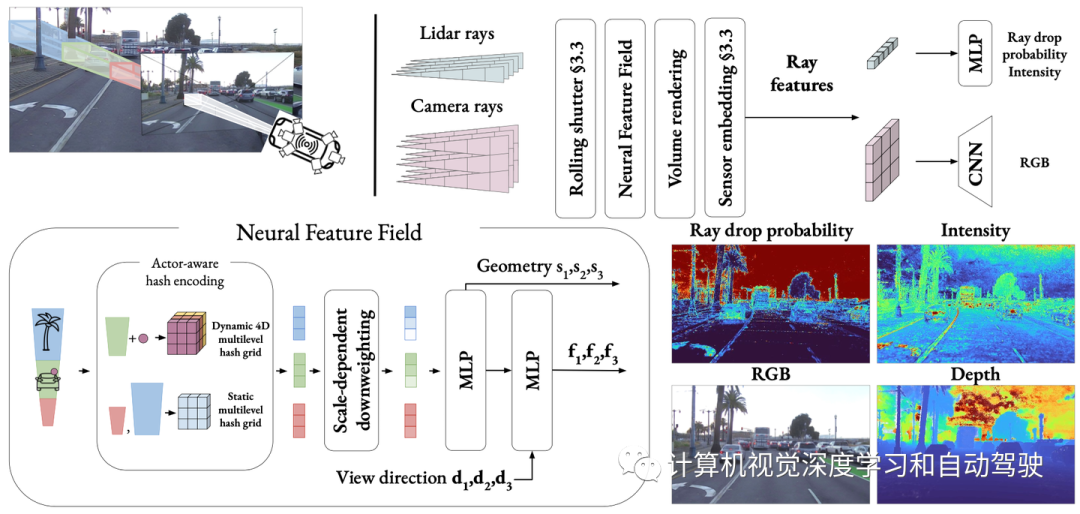

论文”NeuRAD: Neural Rendering for Autonomous Driving”,来自Zenseact,Chalmers科技大学,Linkoping大学和Lund大学。 ☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSee…
-
复旦大学打造蘑菇车联自动驾驶人工智能研究中心揭幕



12月20日,据donews消息,12月19日在上海举行的上海市“脑与类脑智能基础转化应用研究”科技重大专项2023年度总结会上,复旦大学-蘑菇车联“自动驾驶人工智能校企联合研究中心”正式揭牌。揭牌仪式上,复旦大学校长、中国科学院院士金力以及蘑菇车联创始人兼首席执行官朱磊出席并见证了这一重要时刻 ☞…
-
软硬约束下的轨迹生成:理论与代码详解
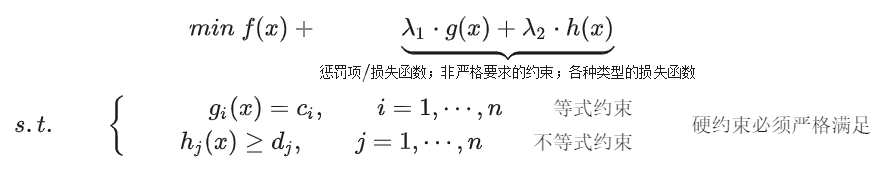
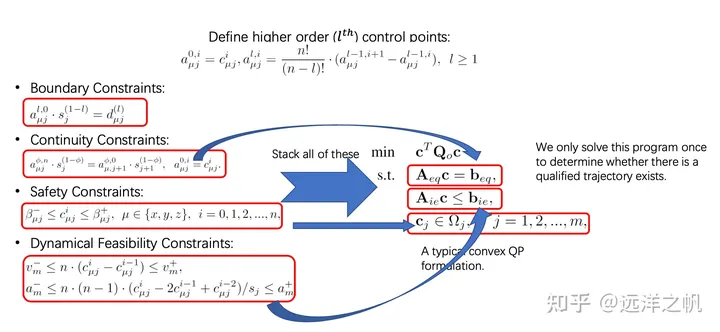
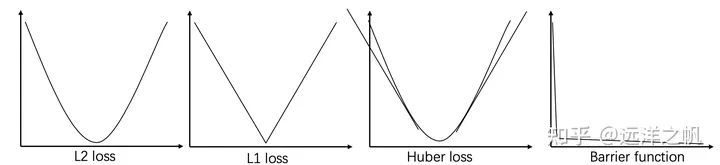
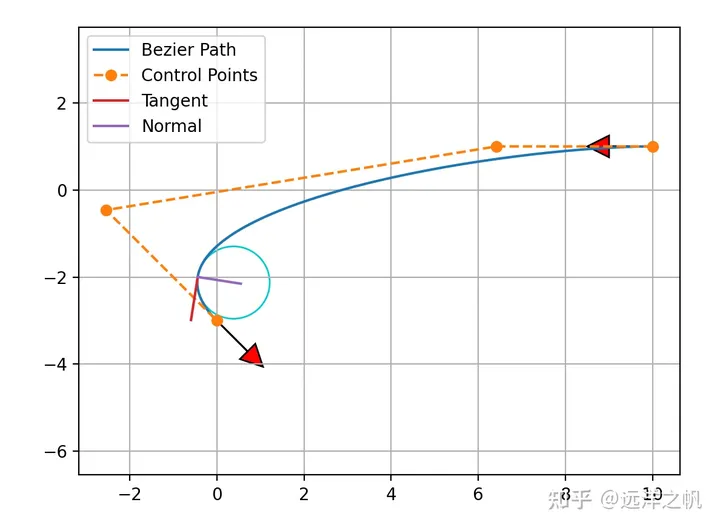
本项目代码: github.com/liangwq/robot_motion_planing 轨迹约束中的软硬约束 前面的几篇文章已经介绍了,轨迹约束的本质就是在做带约束的轨迹拟合。输入就是waypoint点list,约束条件有两种硬约束和软约束。所谓硬约束对应到数学形式就是代价函数,硬约束对应的就…
-
高效提升检测能力:突破200米以上小目标检测
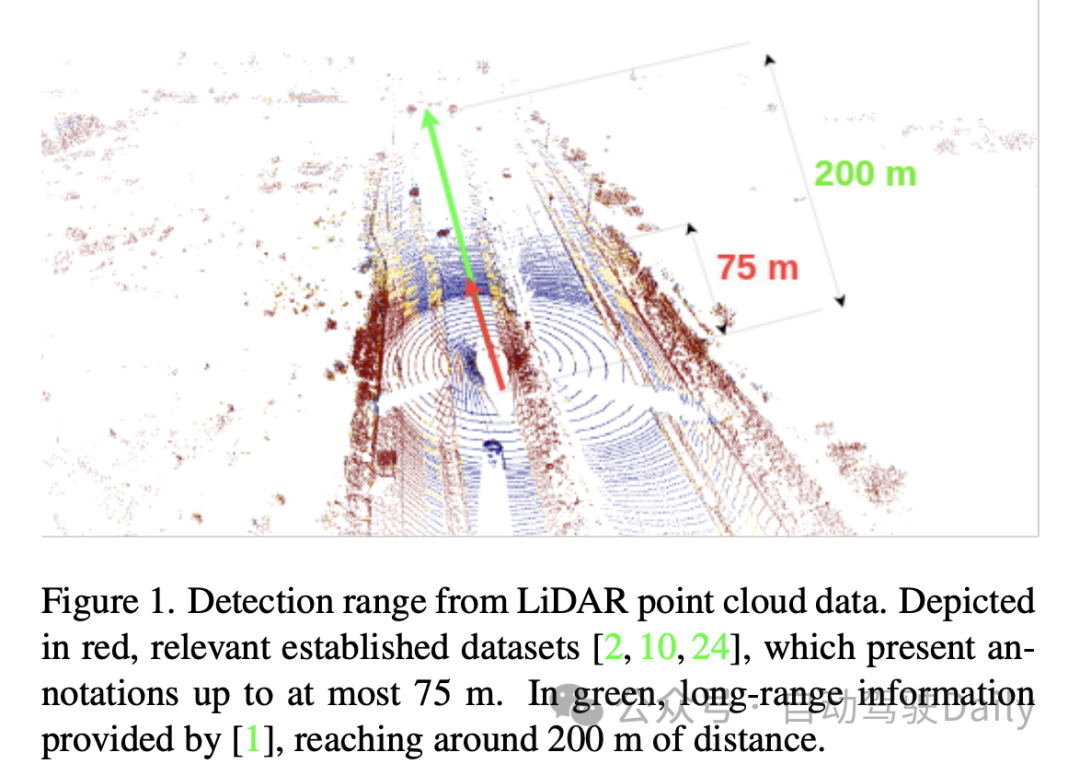
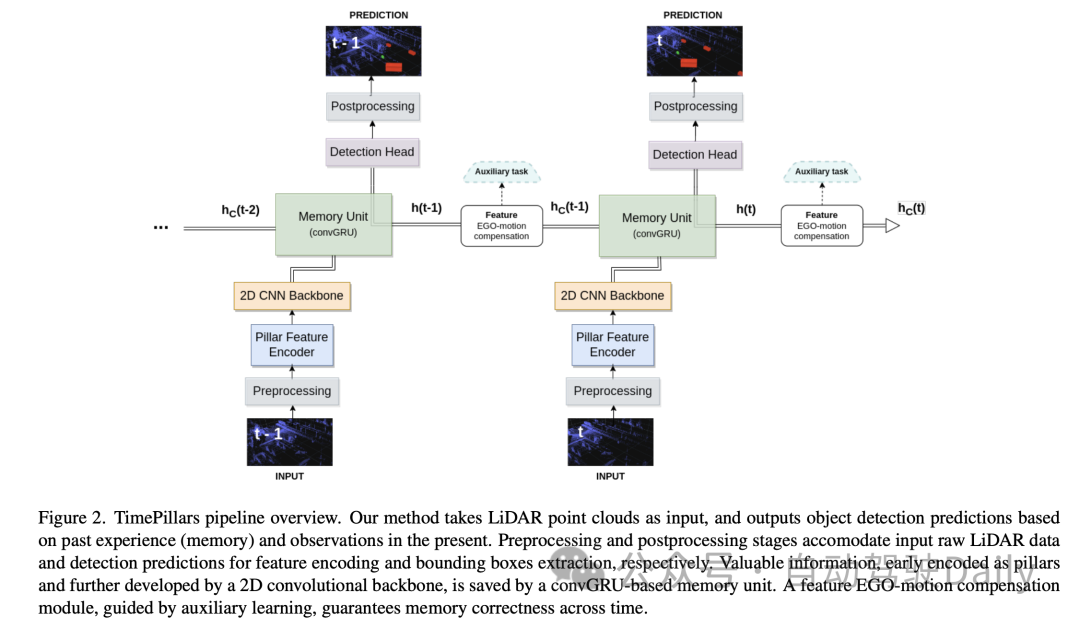

本文经自动驾驶之心公众号授权转载,转载请联系出处。 基于LiDAR点云点3D Object Detection一直是一个很经典的问题,学术界和工业界都提出了各种各样的模型来提高精度、速度和鲁棒性。但因为室外的复杂环境,所以室外点云的Object Detection的性能都还不是太好。而激光雷达点云本…
-
抗干扰框架ADMap:重建在线矢量化高精地图的利器


☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜ 论文链接:https://arxiv.org/pdf/2401.13172.pdf代码链接:https://github.com/hht1996ok/ADMap 摘要 本文介绍了ADMap,这是…
-
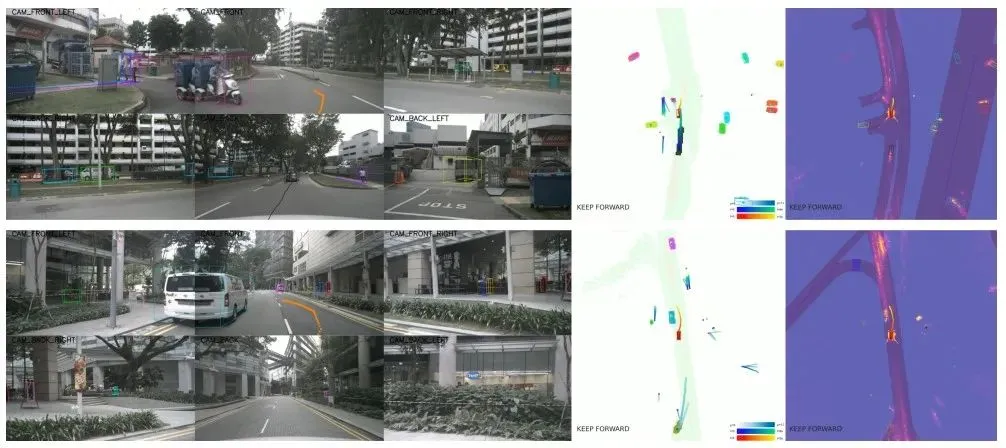
进一步加速落地:压缩自动驾驶端到端运动规划模型
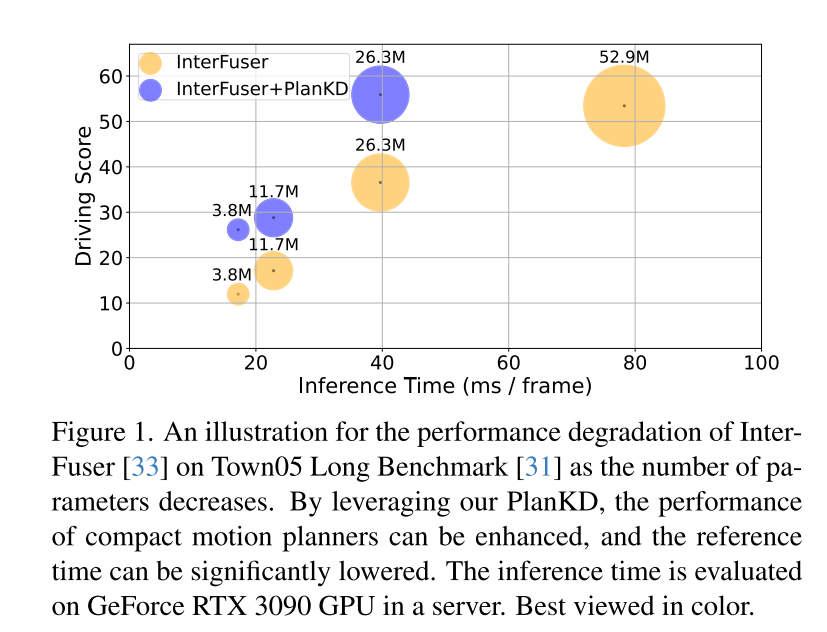
原标题:on the road to portability: compressing end-to-end motion planner for autonomous driving 论文链接:https://arxiv.org/pdf/2403.01238.pdf 代码链接:https://gi…
-
聊聊端到端与下一代自动驾驶系统,以及端到端自动驾驶的一些误区?

最近一个月由于众所周知的一些原因,非常密集地和行业内的各种老师同学进行了交流。交流中必不可免的一个话题自然是端到端与火爆的特斯拉 fsd v12。想借此机会,整理一下在当下这个时刻的一些想法和观点,供大家参考和讨论。 ☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSe…
-
nuScenes最新SOTA | SparseAD:稀疏查询助力高效端到端自动驾驶!
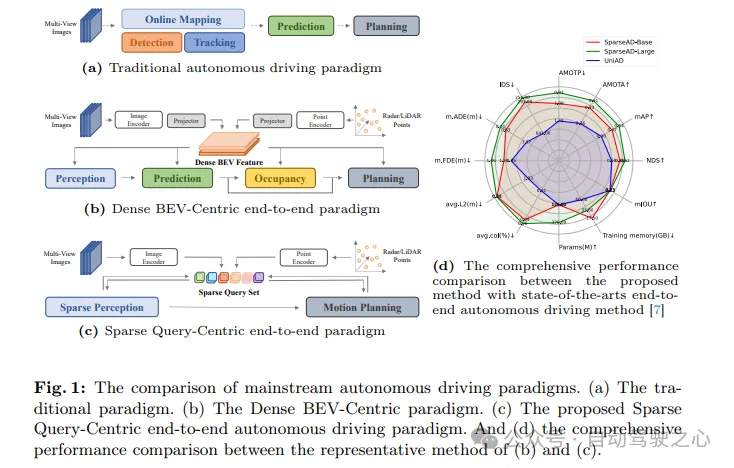
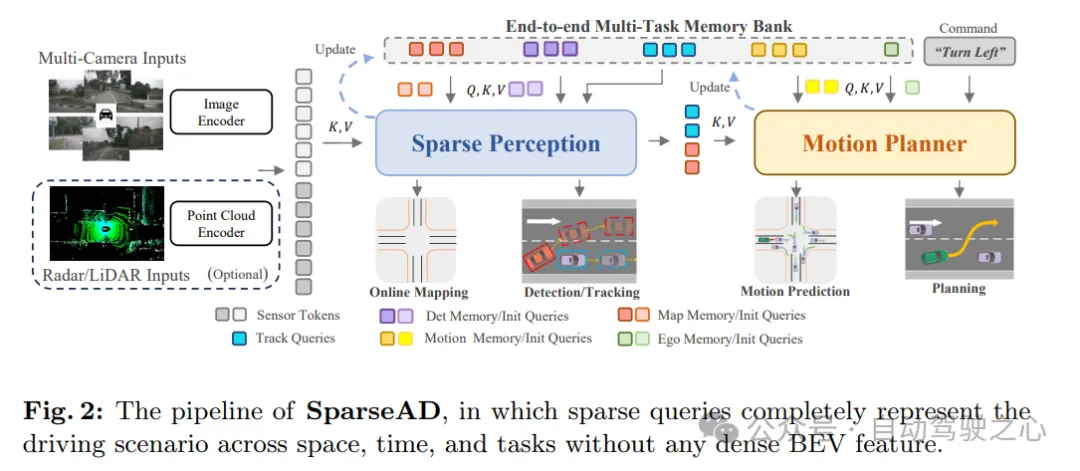
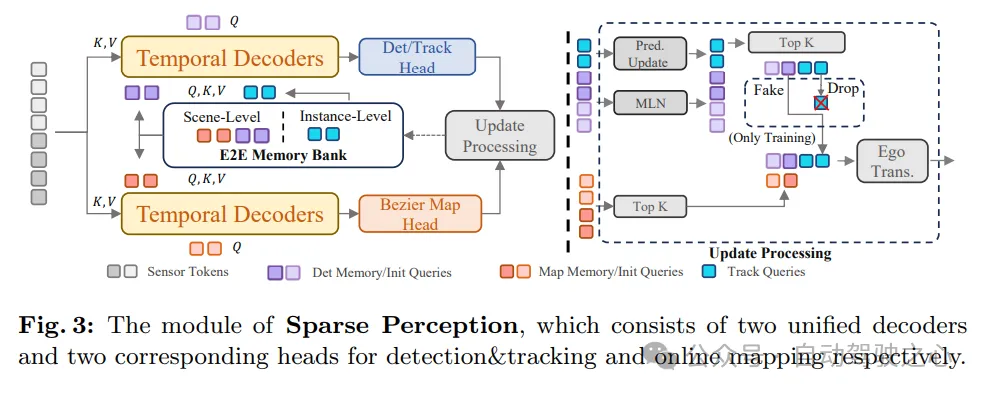

写在前面&出发点 端到端的范式使用统一的框架在自动驾驶系统中实现多任务。尽管这种范式具有简单性和清晰性,但端到端的自动驾驶方法在子任务上的性能仍然远远落后于单任务方法。同时,先前端到端方法中广泛使用的密集鸟瞰图(BEV)特征使得扩展到更多模态或任务变得困难。这里提出了一种稀疏查找为中心的端到…
-
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
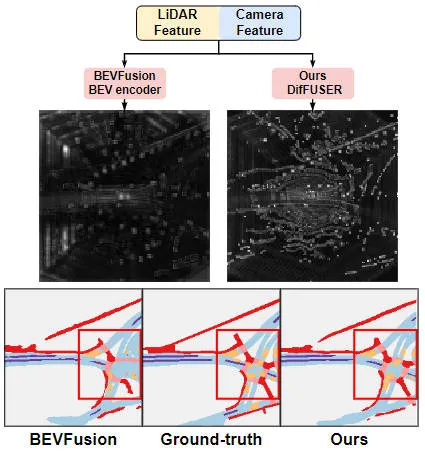
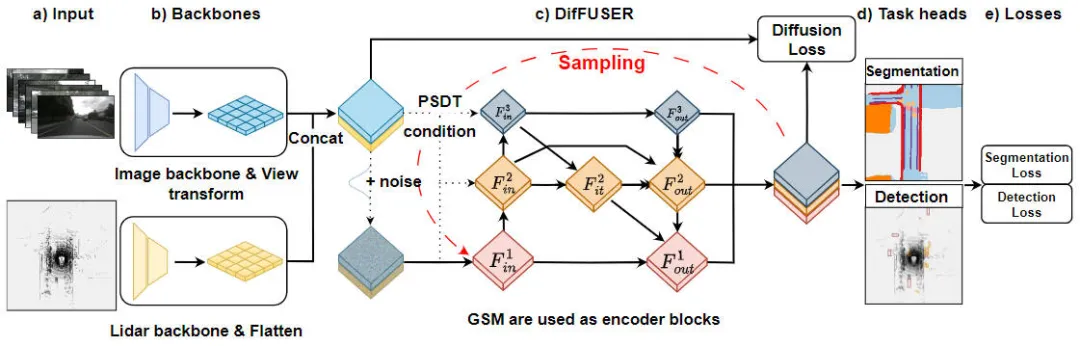
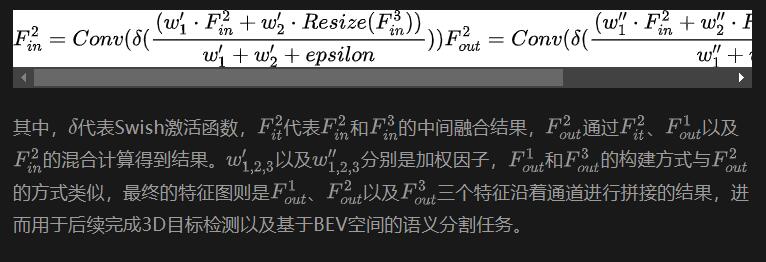
写在前面&笔者的个人理解 目前,随着自动驾驶技术的越发成熟以及自动驾驶感知任务需求的日益增多,工业界和学术界非常希望一个理想的感知算法模型,可以同时完成三维目标检测以及基于BEV空间的语义分割任务。对于一辆能够实现自动驾驶功能的车辆而言,其通常会配备环视相机传感器、激光雷达传感器以及毫米波雷…
-
FisheyeDetNet:首个基于鱼眼相机的目标检测算法
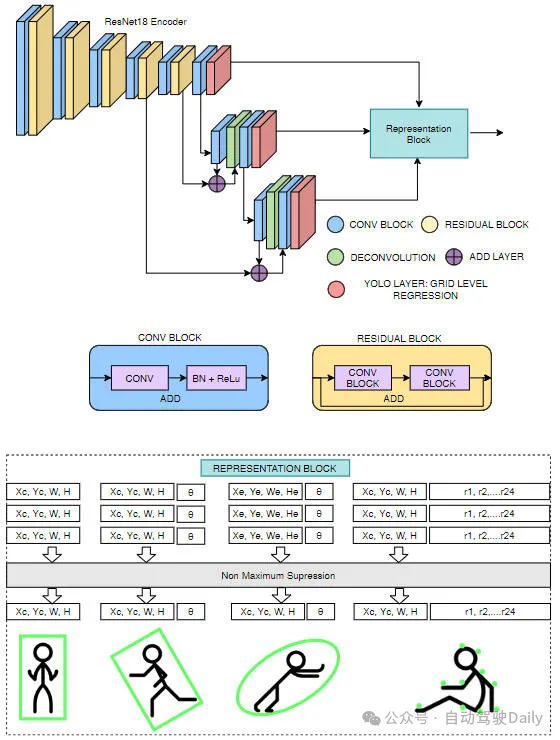

目标检测在自动驾驶系统当中是一个比较成熟的问题,其中行人检测是最早得以部署算法之一。在多数论文当中已经进行了非常全面的研究。然而,利用鱼眼相机进行环视的距离感知相对来说研究较少。由于径向畸变大,标准的边界框表示在鱼眼相机当中很难实施。为了缓解上述描述,我们探索了扩展边界框、椭圆、通用多边形设计为极坐…
