☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
论文链接:https://arxiv.org/pdf/2401.13172.pdf代码链接:https://github.com/hht1996ok/ADMap
摘要
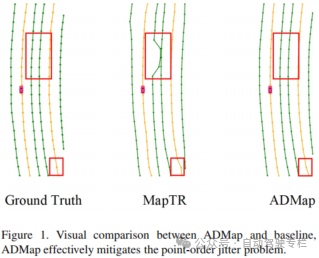
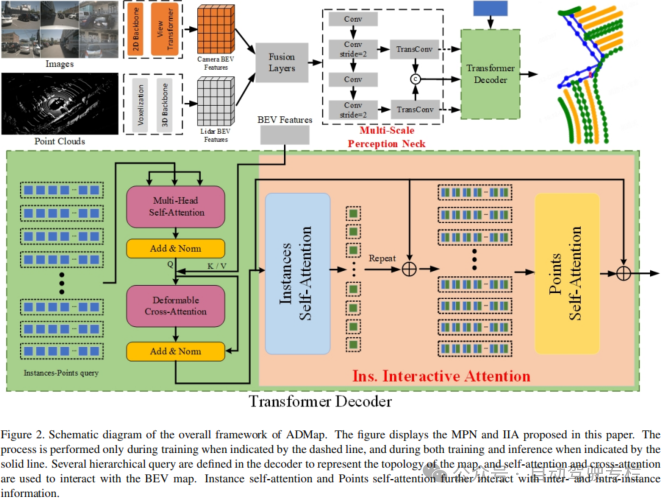
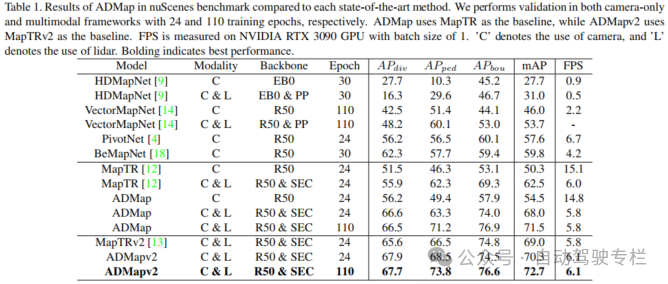
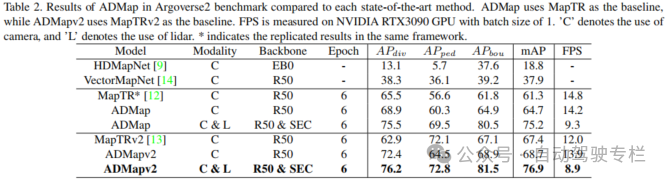
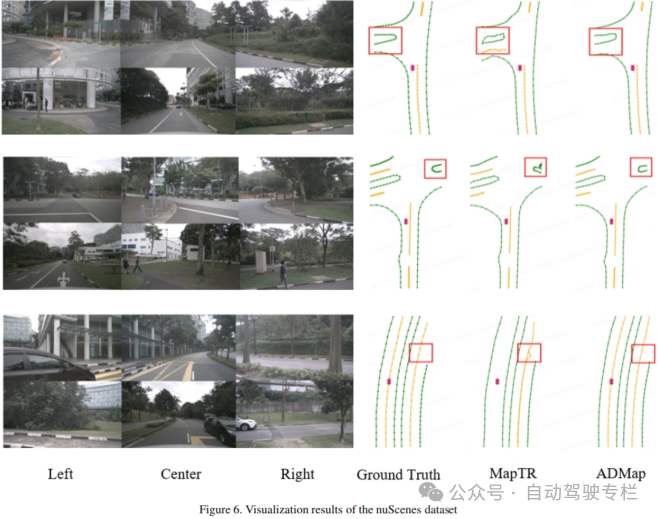
本文介绍了ADMap,这是一种用于重建在线矢量化高精地图的抗干扰框架。在自动驾驶领域,高精地图的在线重建对于规划任务至关重要。近年来,已经有多种高性能的高精地图重建模型被开发出来以满足这一需求。然而,由于存在预测偏差,实例向量内的点序列可能会出现抖动或锯齿状,进而影响后续任务的进行。为此,本文提出了抗干扰地图重建框架ADMap。ADMap框架由三个模块组成,分别是多尺度感知neck(MPN)、实例交互注意力(IIA)和矢量方向差损失(VDDL)。通过级联方式探索实例之间和实例内部的点序关系,该模型能够更有效地监测点序预测过程,从而缓解点序抖动的问题。实验证明,ADMap在nuScenes和Argoverse2数据集上实现了最先进的性能。大量的结果表明,在复杂且多变的驾驶场景中,ADMap能够生成稳定且可靠的地图元素。这对于自动驾驶系统的安全和准确性至关重要。总的来说,ADMap是一种创新的抗干扰地图重建框架,它能够有效地解决点序抖动问题,并在实际数据集上展现出卓越的性能。这一研究对于推动自动驾驶技术的发展具有重要的意义。
主要贡献
本文的贡献如下:
1)本文提出了端到端ADMap,它可以重建更稳定的矢量化高精地图;
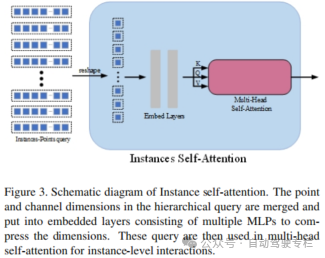
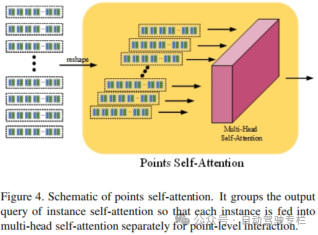
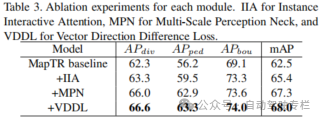
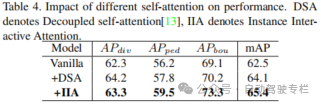
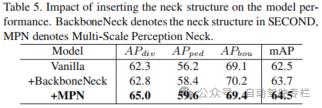
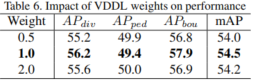
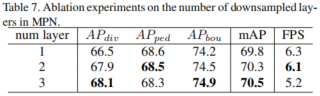
MPN通过不增加计算资源的方式,能够更精确地捕获多尺度信息。而IIA则有效地实现了实例之间和实例内部信息的交互,从而缓解了实例点位置偏移的问题。另外,VDDL利用拓扑信息来监督point-order位置的重建过程,并且对矢量方向差进行建模。
3)ADMap能够实时重建矢量化高精地图,并且在nuScenes和Argoverse2基准测试中实现了最佳性能。
论文图片和表格
 AI改图神器
AI改图神器
AI万能图片编辑器,一键抠图,去水印,智能图片美化,照片转漫画,照片变活转视频,图片无损放大,一键背景虚化,位图智能转矢量图
 37 查看详情
37 查看详情 


总结
ADMap是一种有效且高效的矢量化高精地图重建框架,其通过多尺度感知Neck、实例交互注意力和矢量方向差损失这三个模块,有效地缓解了由实例点抖动造成的地图拓扑失真问题。大量实验表明,本文所提出的方法能够在nuScenes和Argoverse2基准上获得最佳性能,其高效性也得以验证。我们相信,ADMap可以帮助社区推动有关矢量化高精地图重建任务的研究,以更好地发展自动驾驶等领域。

原文链接:https://mp.weixin.qq.com/s/O0BoiJZwIQmeeChUZkMMng
以上就是抗干扰框架ADMap:重建在线矢量化高精地图的利器的详细内容,更多请关注创想鸟其它相关文章!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 chuangxiangniao@163.com 举报,一经查实,本站将立刻删除。
发布者:程序猿,转转请注明出处:https://www.chuangxiangniao.com/p/429572.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫