
自动驾驶
-
FMCW雷达位置识别如何优雅的实现(IROS2023)
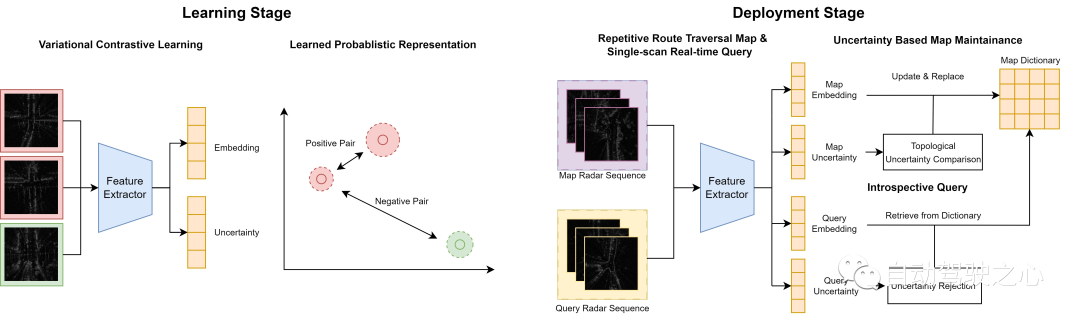
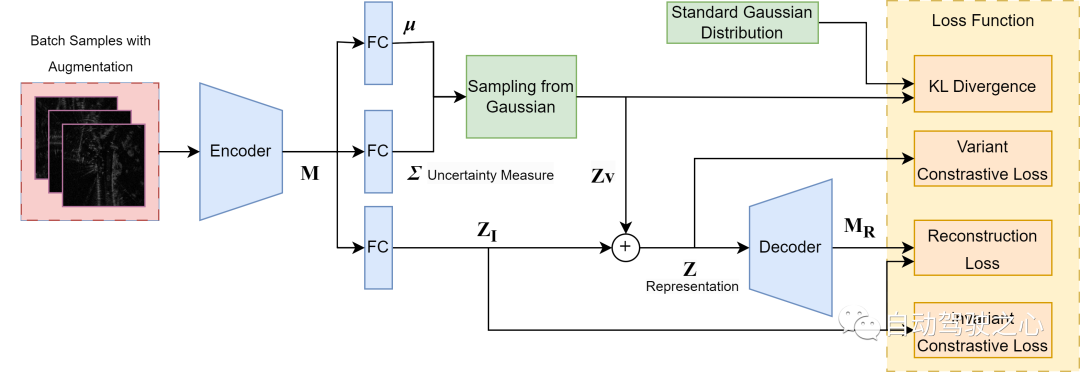
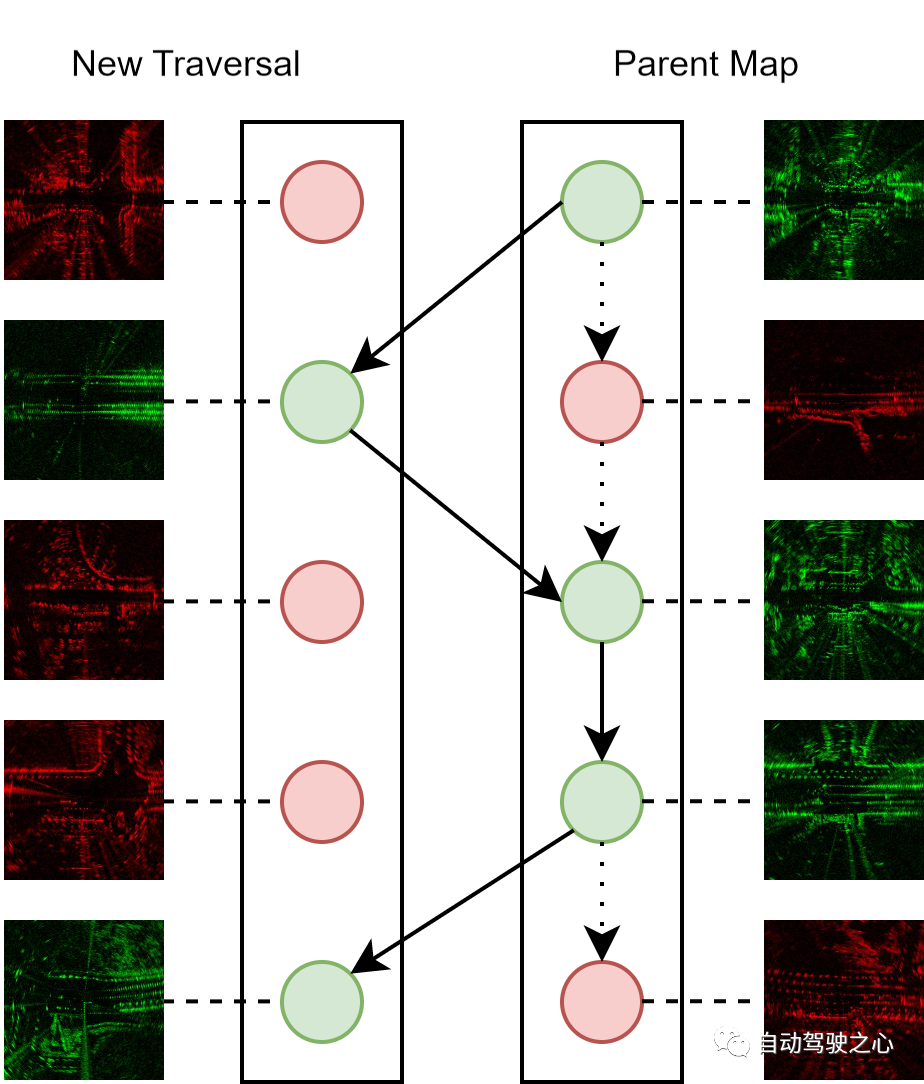

大家好,我叫袁健豪,很开心来%ignore_a_1%之心平台分享我们在iros2023上关于雷达位置识别的工作。 由于其对挑战性环境的固有抗性,使用调频连续波 (FMCW) 雷达的定位越来越受到关注。然而,雷达测量过程的复杂伪影需要适当的不确定性估计 – 以确保这种有前景的传感器模式的安…
-
TimePillars:让纯LiDAR 3D检测路线延伸至何方?直接覆盖200m!
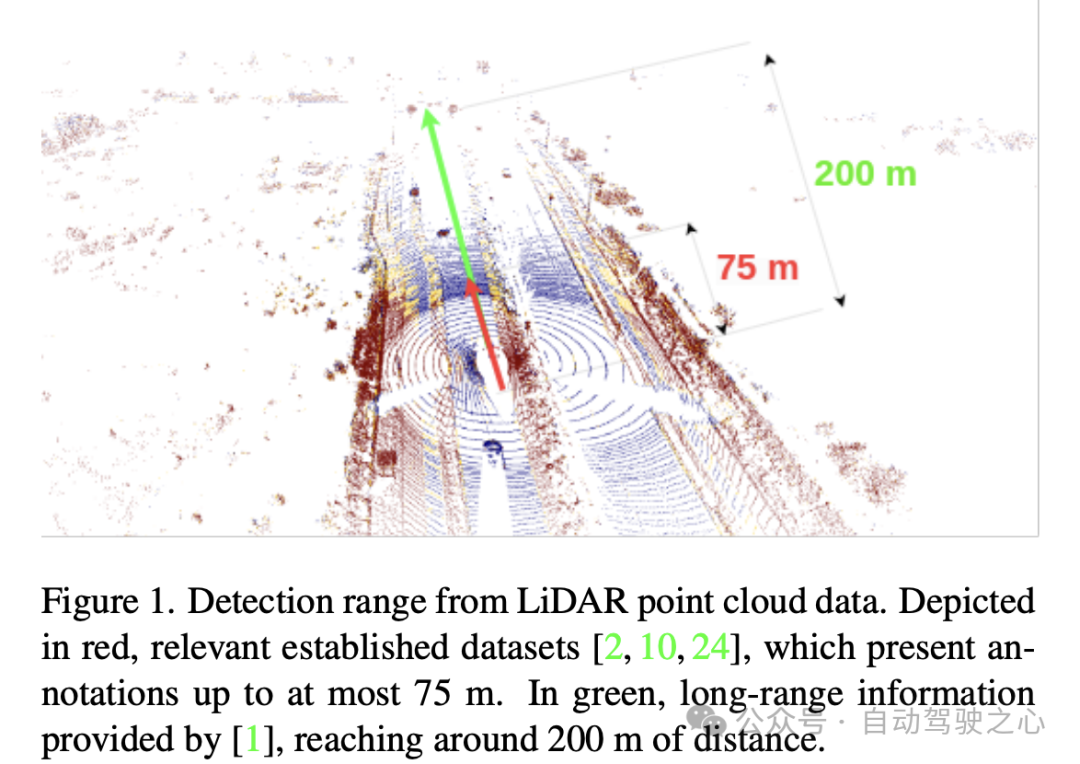
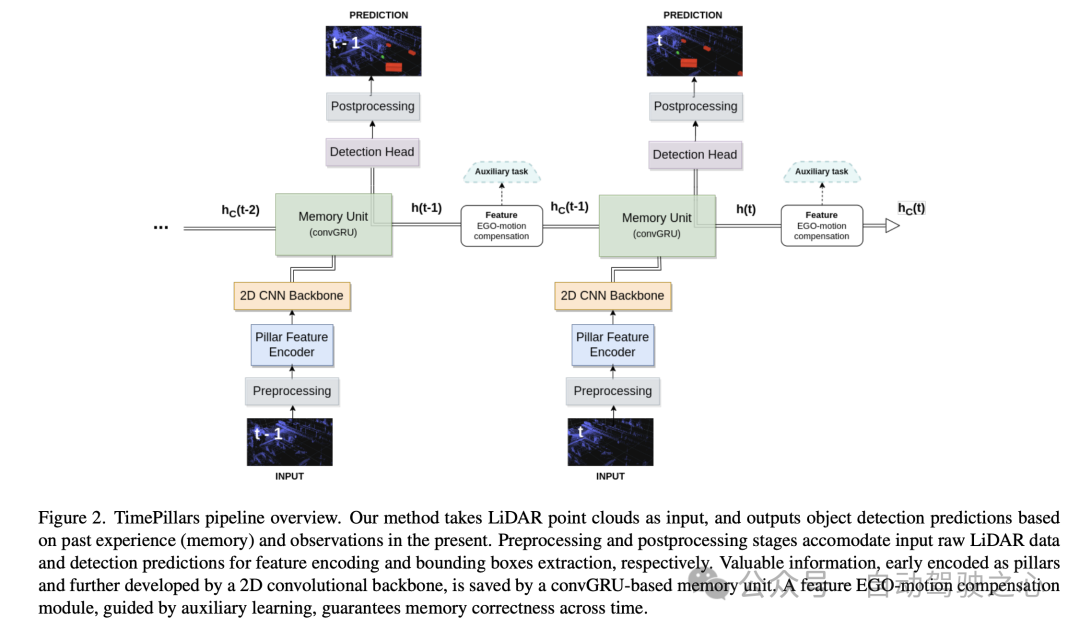


基于lidar点云点3d object detection一哥是一个很经典的问题,学术界和工业界都提出了各种各样的模型来提高精度、速度和鲁棒性。但因为室外的复杂环境,所以室外点云的object detection的性能都还不是太好。而激光雷达点云本质上比较稀疏,如何针对性得解决这一问题呢?论文给出了…
-
OpenAI联合创始人Karpathy发布文章:以自动驾驶为例解释AGI!已删除的原文,请立即收藏



对于「通用人工智能」,OpenAI科学家Karpathy下场做出了解释。 前几天,Karpathy在个人blog发表了一篇文章「将自动驾驶作为AGI的一个案例来研究」。 ☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜ 不知是何原因,他却删除了…
-
OccNeRF:完全无需激光雷达数据监督
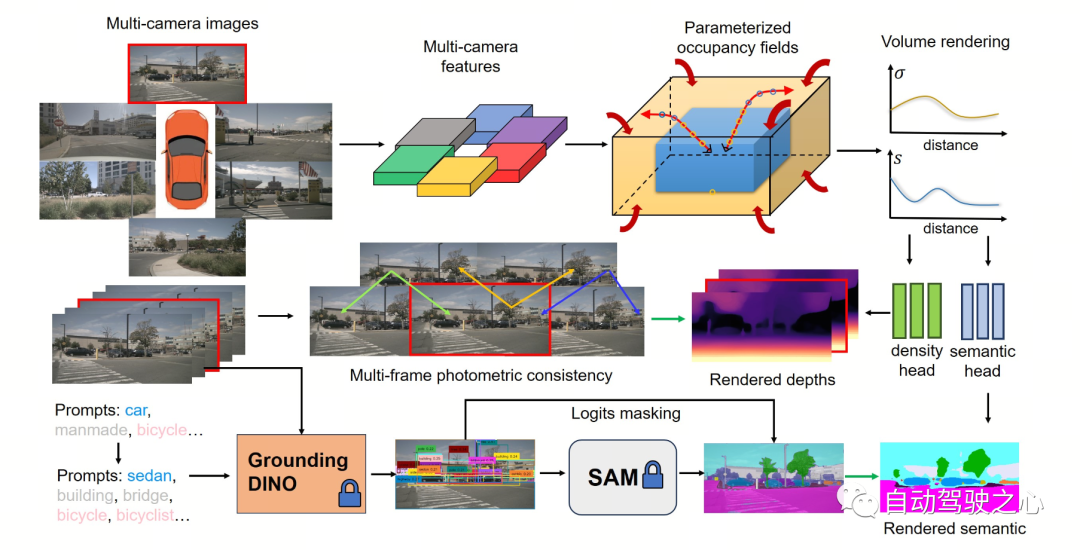
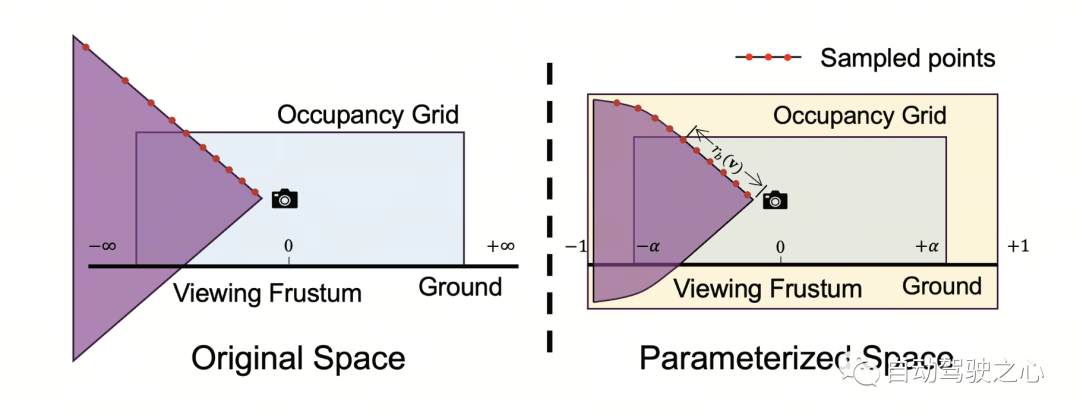
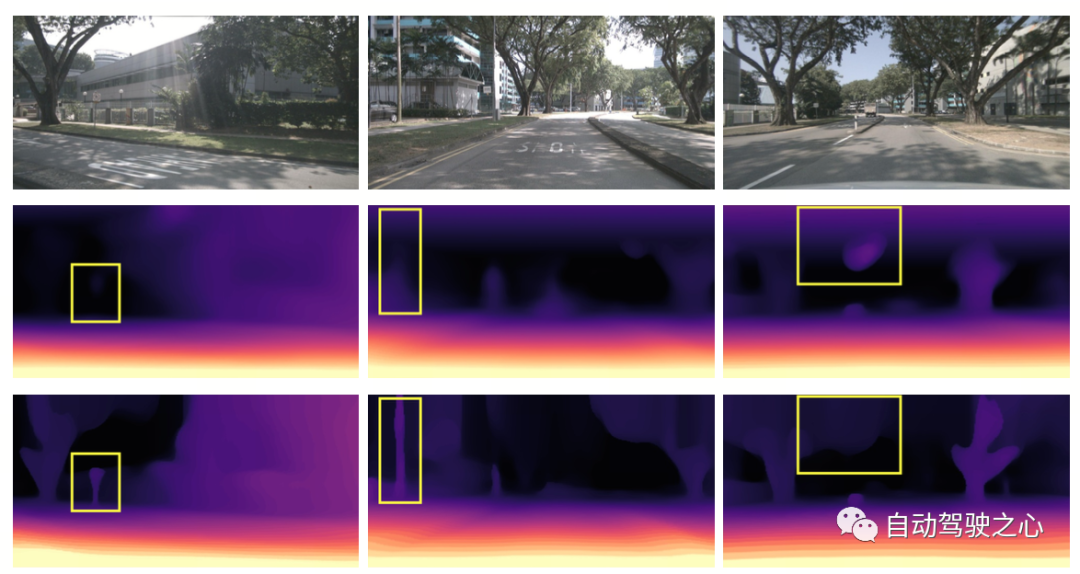
写在前面&笔者的个人总结 近年来,%ignore_a_1%领域的3D占据预测任务因其独特的优势受到学术界和工业界的广泛关注。该任务通过重建周围环境的3D结构,为自动驾驶的规划和导航提供详细信息。然而,目前主流的方法大多依赖于基于激光雷达(LiDAR)点云生成的标签来监督网络训练。在最近的Oc…
-
OmniDrive: 一个关于大模型与3D驾驶任务对齐的框架


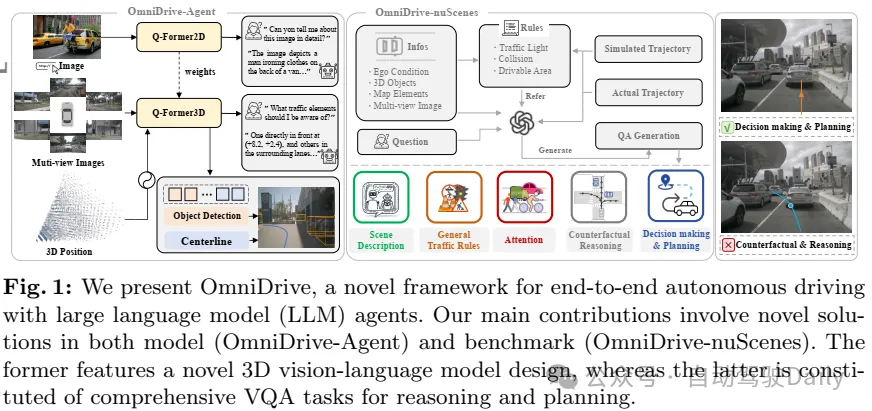
从一个新颖的3d mllm架构开始,该架构使用稀疏查询将视觉表示提升和压缩到3d,然后将其输入llm。 题目:OmniDrive: A Holistic LLM-Agent Framework for Autonomous Driving with 3D Perception Reasoning a…
-
MIT最新!多模态LLM真的无所不能吗?大模型能解决一切难题吗?
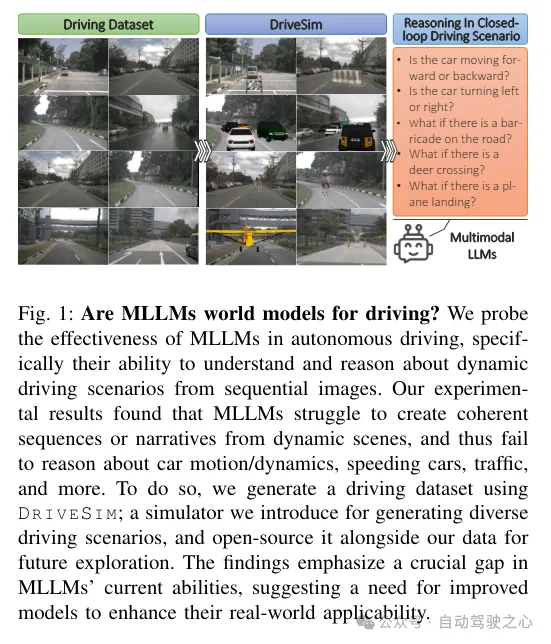

写在前面&笔者的个人理解 本文对自动驾驶领域内多模态大型语言模型(MLLMs)的应用进行了审慎的审视,并对一些常见的假设提出了质疑/验证,重点关注它们通过闭环控制环境中的图像/帧序列推理和解释动态驾驶场景的能力。尽管GPT-4V等MLLMs取得了显著的进步,但它们在复杂、动态的驾驶环境中的性…
-
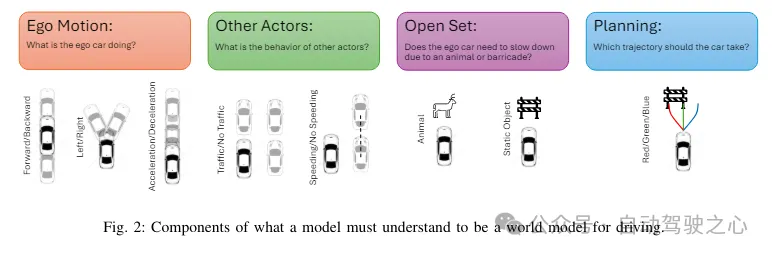
世界模型新突破!极佳科技提出DriveDreamer4D,首次利用世界模型增强4D驾驶场景重建效果

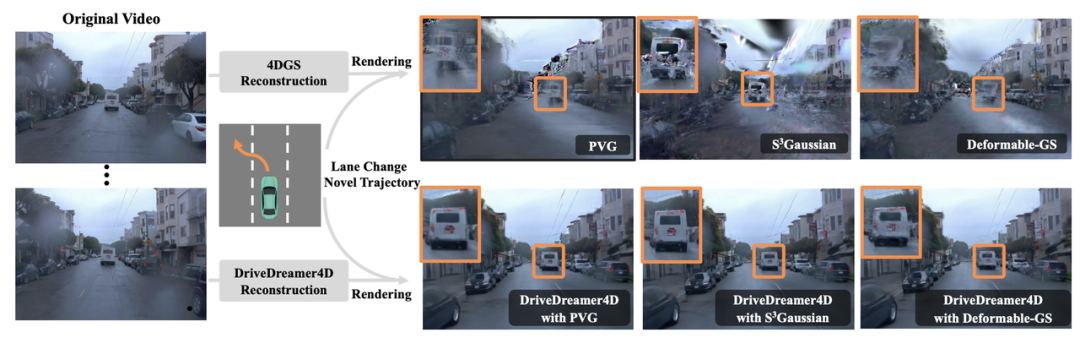
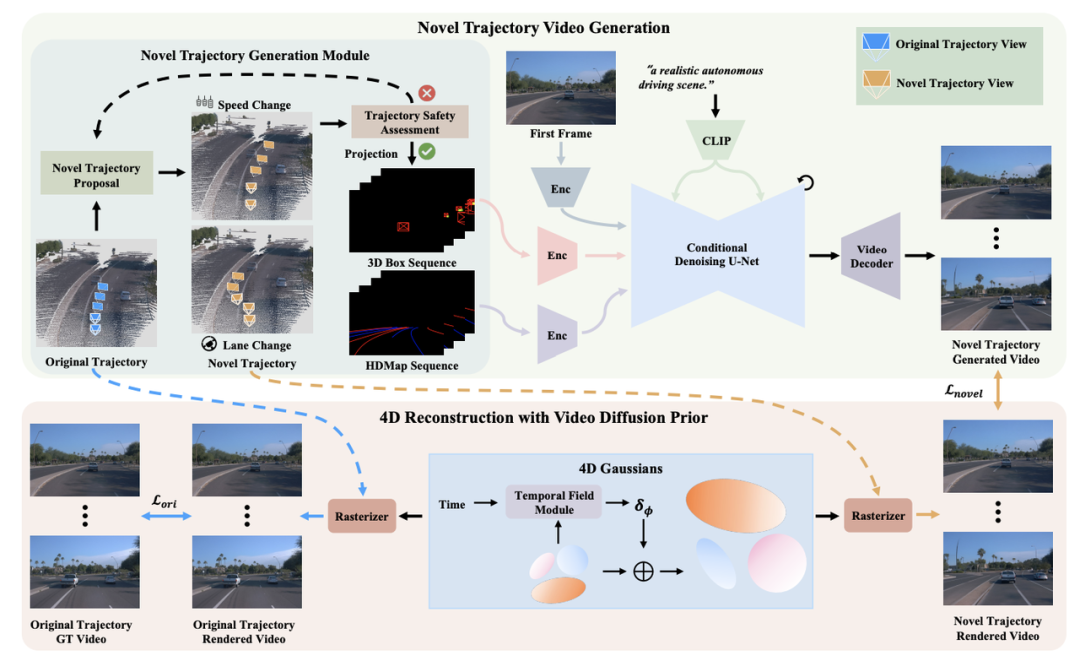
近日,极佳科技联合中国科学院自动化研究所、理想汽车、北京大学、慕尼黑工业大学等单位提出DriveDreamer4D,是首个利用世界模型增强 4D 驾驶场景重建效果的工作。DriveDreamer4D 可以大幅提升多种自动驾驶 4D 重建算法的效果,在 user study 实验中获得了超过 80% …
-
机构:2029年激光雷达市场产值预计达53.52亿美元,年复合成长率达35%
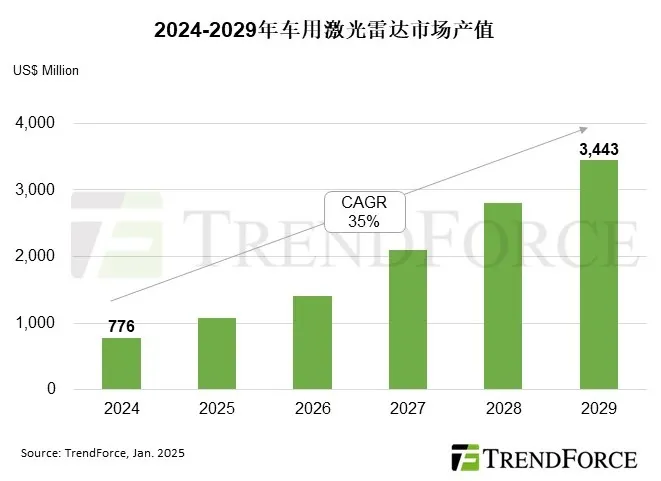
trendforce最新报告显示,激光雷达(lidar)目前已广泛应用于汽车和工业领域。在汽车领域,主要应用于乘用车和无人驾驶汽车,助力高级驾驶辅助系统(adas)和更高等级的自动驾驶;在工业领域,则服务于机器人、工厂自动化和物流等。 得益于3级及以上自动驾驶系统和物流运输的快速发展,激光雷达市场价…
-
我国牵头制定的自动驾驶测试场景评价国际标准发布

☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜ 记者7月7日从工业和信息化部获悉,由我国主导编制的国际标准《道路车辆 %ignore_a_1%系统测试场景 场景评价与测试用例生成》近日正式对外发布。 测试场景是检验自动驾驶系统性能和功能的关键…
-
Robotaxi助特斯拉股价大涨,专家为何集体警告“挑战艰巨”?
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜ 特斯拉推出自动驾驶出租车服务 北京时间6月24日,根据路透社报道,特斯拉正式发布了其自动驾驶出租车,但接下来的挑战才真正考验其能力。 上周末,特斯拉在得克萨斯州奥斯汀首次启用了自动驾驶出租车,在…

